

Для сохранения популяции белых медведей в Арктике учёные решили создать специализированную станцию для подкормки этих краснокнижных животных.
Однако погодные условия Арктики не очень комфортны для человека. Зимой наступает полярная ночь, длящаяся полгода, и температура может падать ниже -60 градусов по Цельсию.
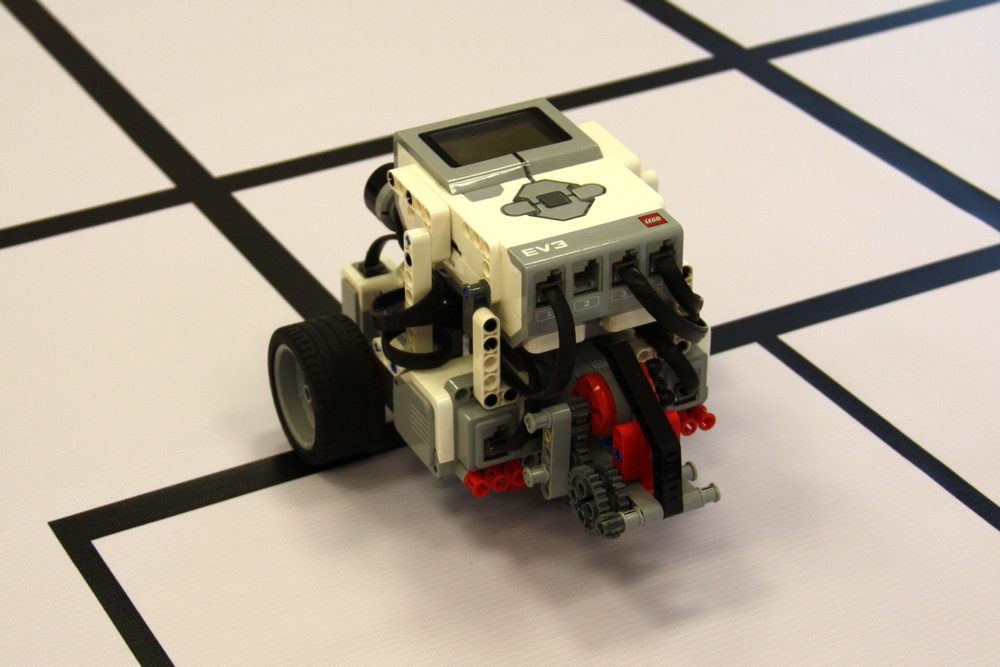
Поэтому на помощь нашим учёным придут роботы, которые готовы работать в самых нечеловеческих условиях. Наше задание заключается в создании роботизированной станции подкормки, которая представляет собой поле со специально определёнными местами в центре него, где и будет происходить подкормка животных (отмечено красным цветом). На станцию доставляется подкормка (объекты кубической формы белого цвета), которая загружается на специальные подвижные платформы. Зоны начального расположения этих подвижных платформ отмечены жёлтым цветом.
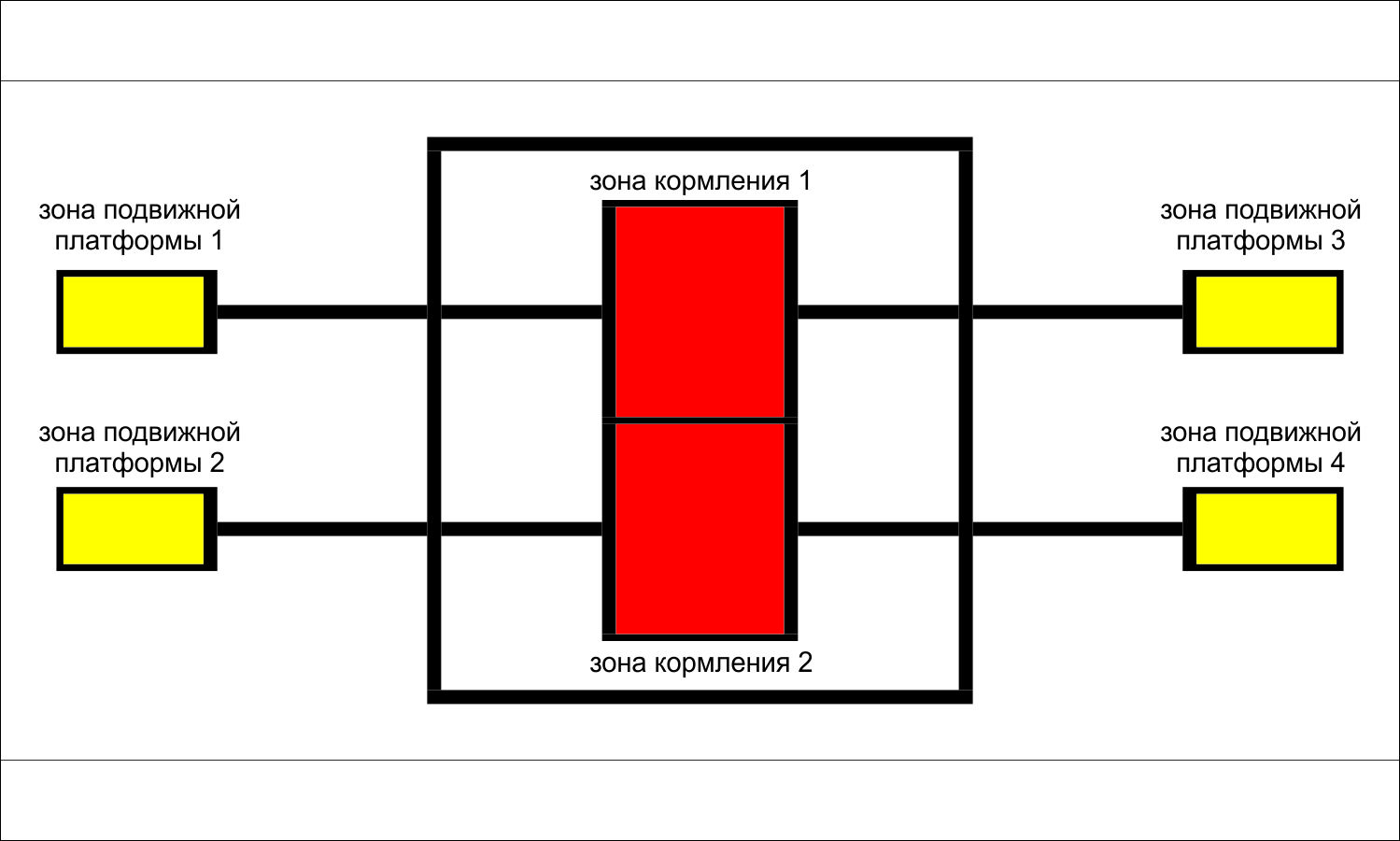
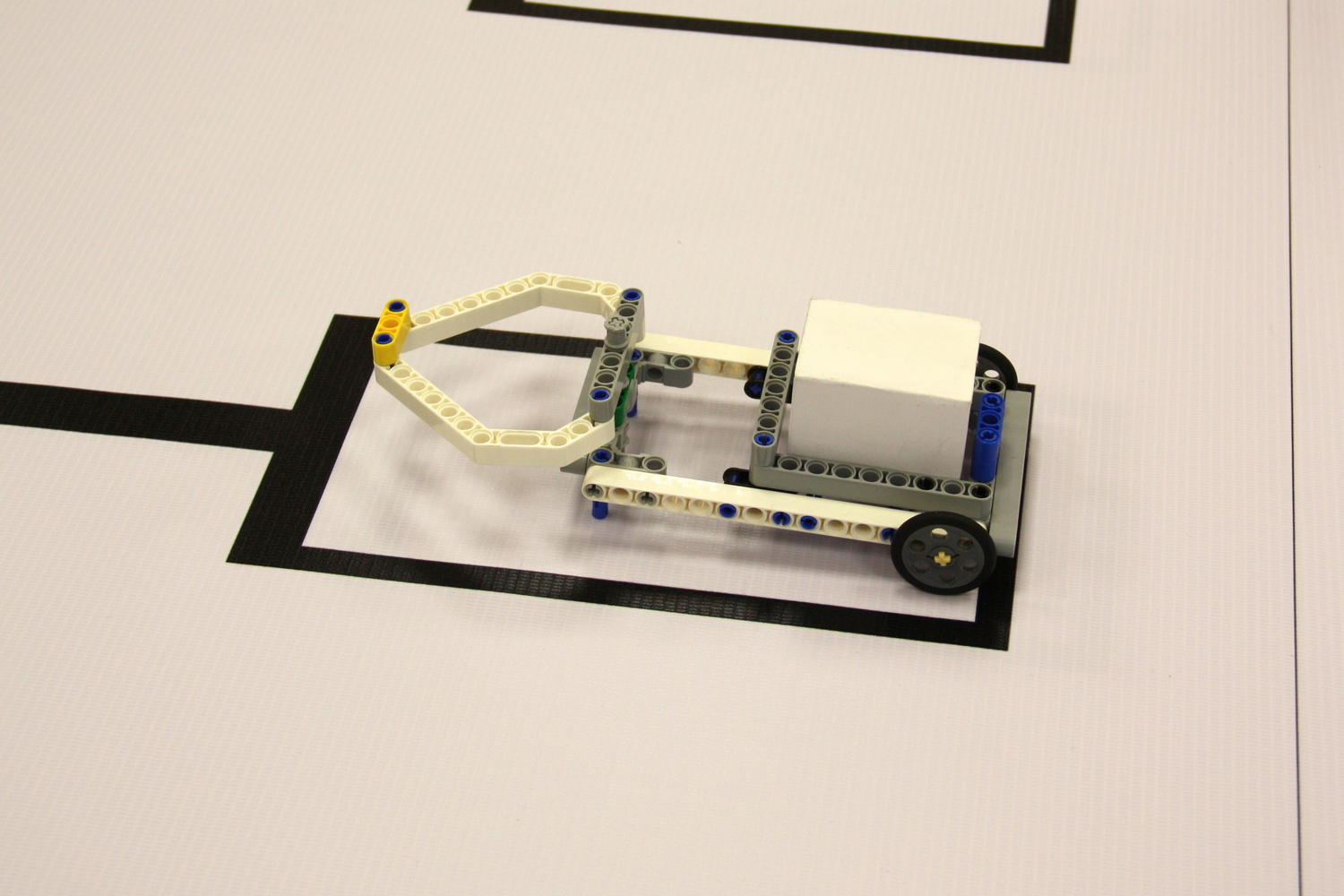
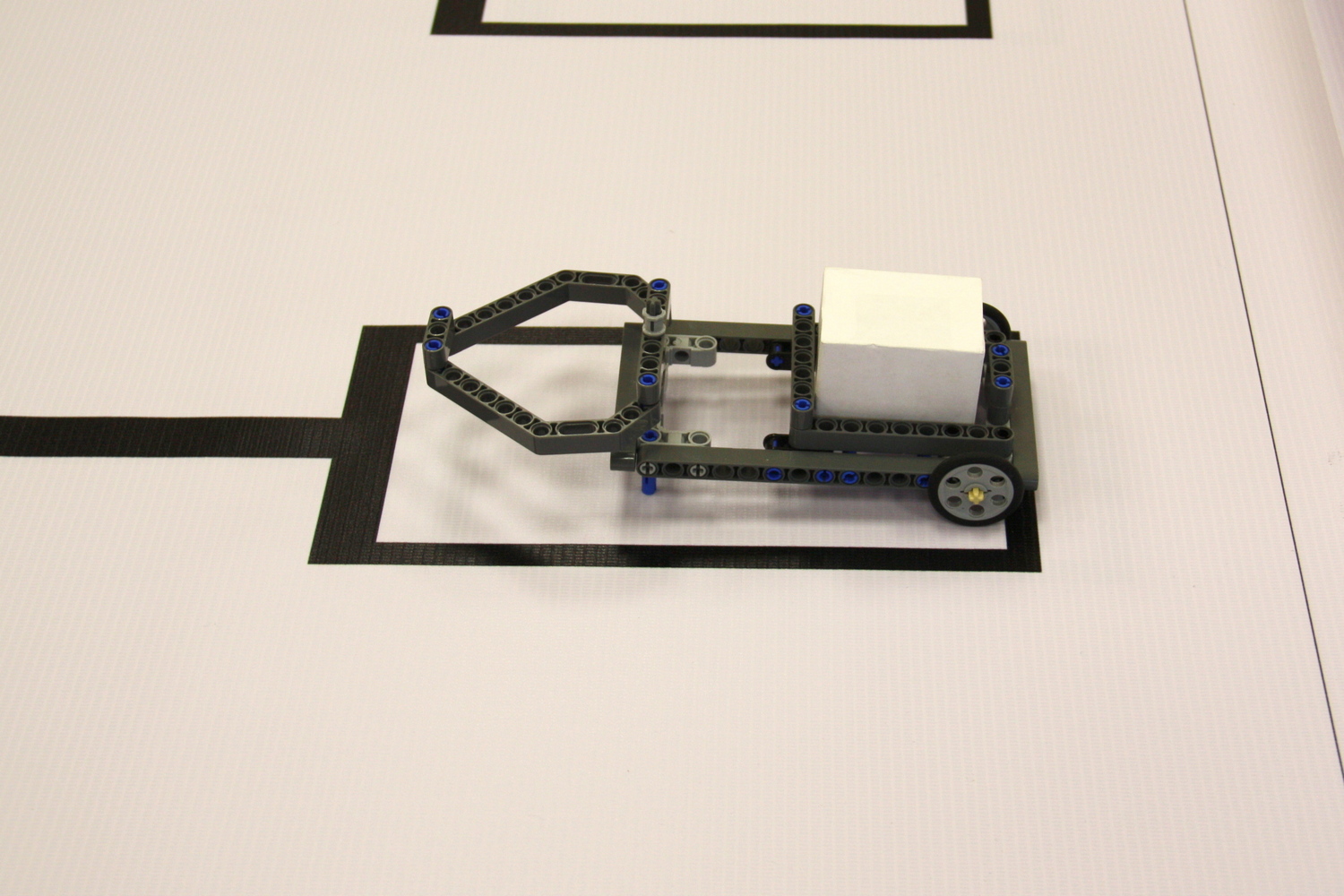
Роботу необходимо с помощью устройства захвата платформы (подвижной угловой балки) зацепить подвижную платформу и транспортировать её в зону кормления таким образом, чтобы в каждой из двух возможных зон кормления было не более одной платформы.
В каждой зоне начального размещения подвижных платформ может быть не более одной. Общее количество платформ в зонах – не более двух.
Будем считать подвижную платформу с кормом доставленной в зону кормления, если все точки опоры подвижной платформы находятся внутри необходимого прямоугольника зоны кормления.
Требуется написать программу для робота, который в автоматическом режиме должен доставить все подвижные платформы с кормом в зоны кормления таким образом, чтобы в каждой из двух возможных зон было не более одной платформы.
Схема возможных положений объектов (конкретное положение объектов будет определено председателем жюри перед началом проверки):
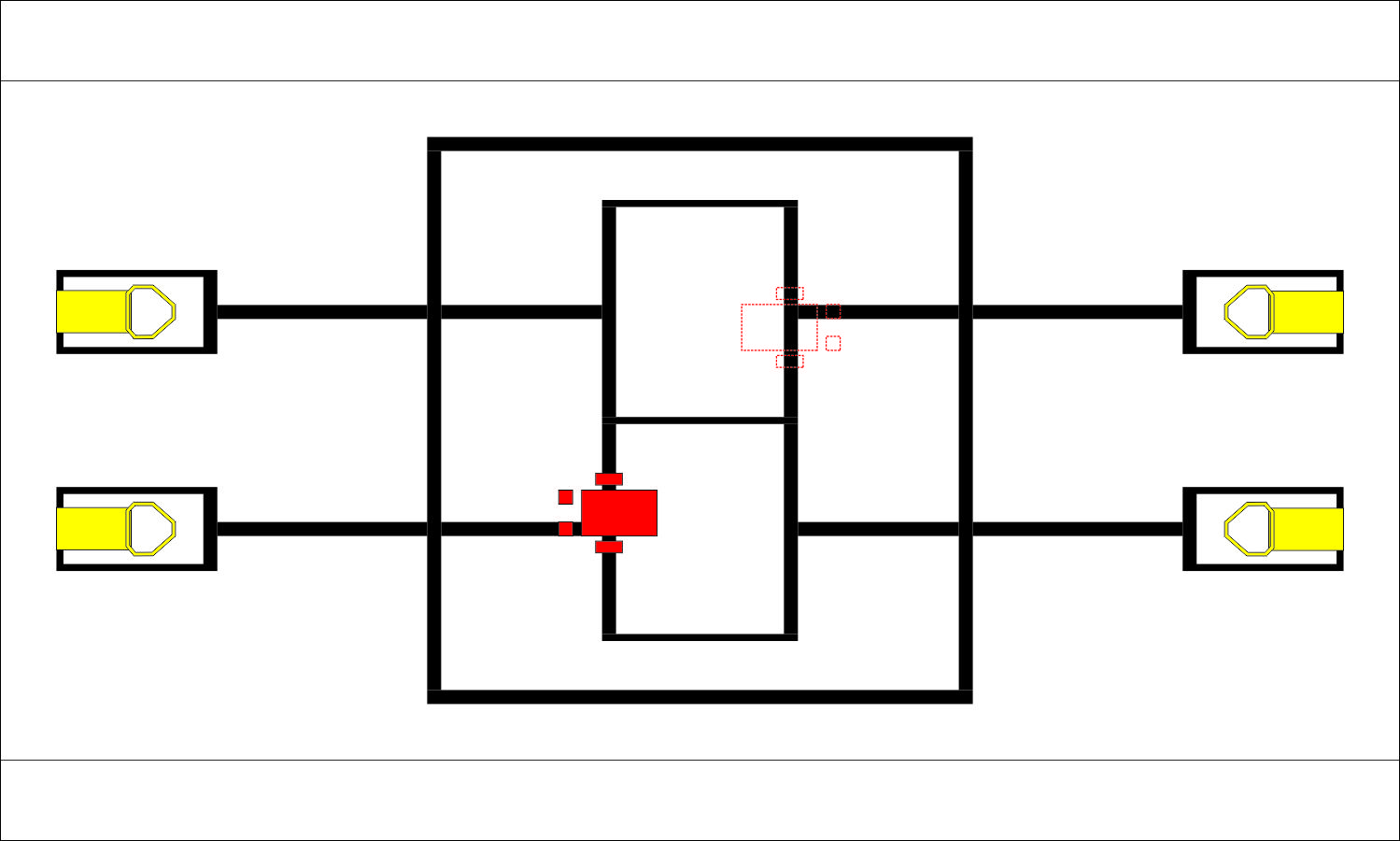

Робот должен начать своё движение из указанной стартовой позиции после того, как осуществляется запуск загруженной в него программы-решения. В момент запуска программы секундомер начинает свой отсчёт.
Робот имеет ограниченную зону действия размером 200×97 см (отмечена ограничивающими линиями). Выход робота (хотя бы одного из его колёс) за пределы зоны не допускается.
Все подвижные платформы находятся в зонах кормления. Робот остановился в любой из зон подвижной платформы (1, 2, 3 или 4). Робот считается находящимся в зоне подвижной платформы, если в этой зоне (либо на её границе) находится хотя бы одно из колёс.
© АО ИОО, 2026