

Для научных целей на арктической научно-исследовательской станции был построен ангар-склад для хранения образцов реликтового льда. Образец представляет собой блок цилиндрической формы. После проведения всестороннего исследования образца его помещали в конце ангара, в специальной зоне погрузки, а затем выносили его за пределы склада для дальнейшего возвращения в естественную для него экосистему. Перемещение блока осуществлялось с помощью специального поддона (палеты).
Для автоматизации процессов, связанных с перемещением блока льда на поддоне, предлагается использовать робота. Одна из задач, которую должен решать робот, это транспортировка предложенного блока на поддоне за пределы ангара. Для того чтобы осуществить такую транспортировку, роботу требуется добраться до блока льда на поддоне, осуществить его погрузку, транспортировку и дальнейшую выгрузку за пределами ангара. Одной из проблем является то, что ангар может быть частично заполнен образцами, и роботу необходимо обогнуть все препятствия максимально аккуратно.
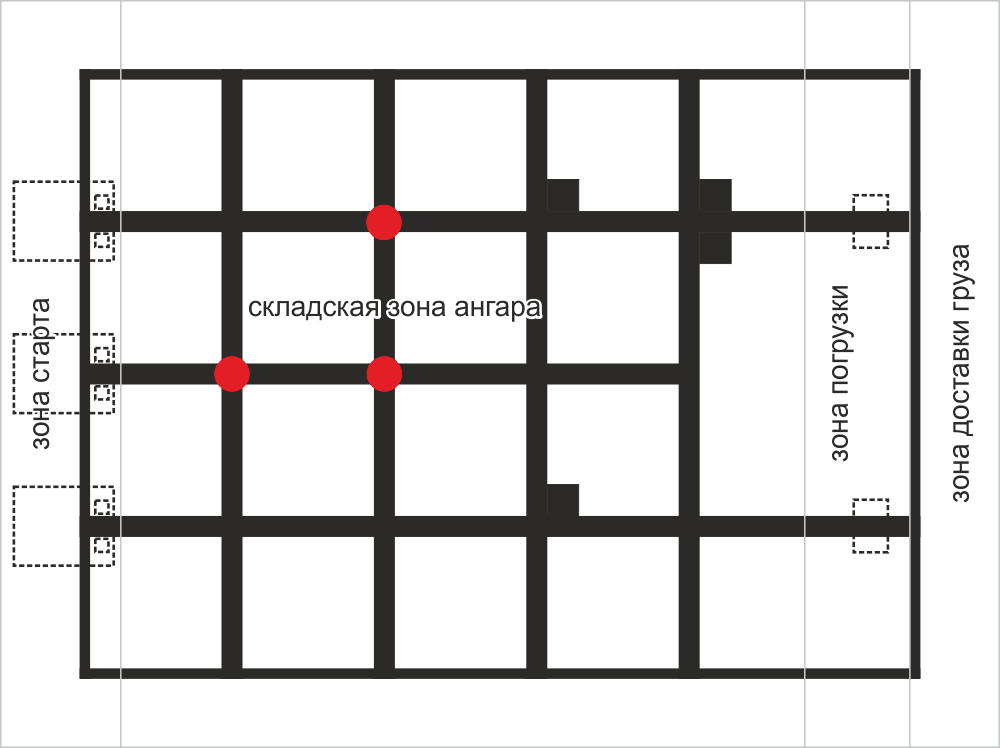
Предложенное поле является моделью ангара, по которому будет перемещаться робот-погрузчик.
Поле разделено на несколько условных зон: старт, складская зона ангара, погрузка и доставка груза. Для удобства позиционирования робота, зона его действия ограничена, а на поле нанесены линии. Толстые линии (4 см.) – линии по которым может двигаться робот. Тонкие линии (2 см.) – границы ангара.
Моделью образцов являются кегли, расположенные в складской зоне ангара. Моделью блока на поддоне – объект кубической формы.

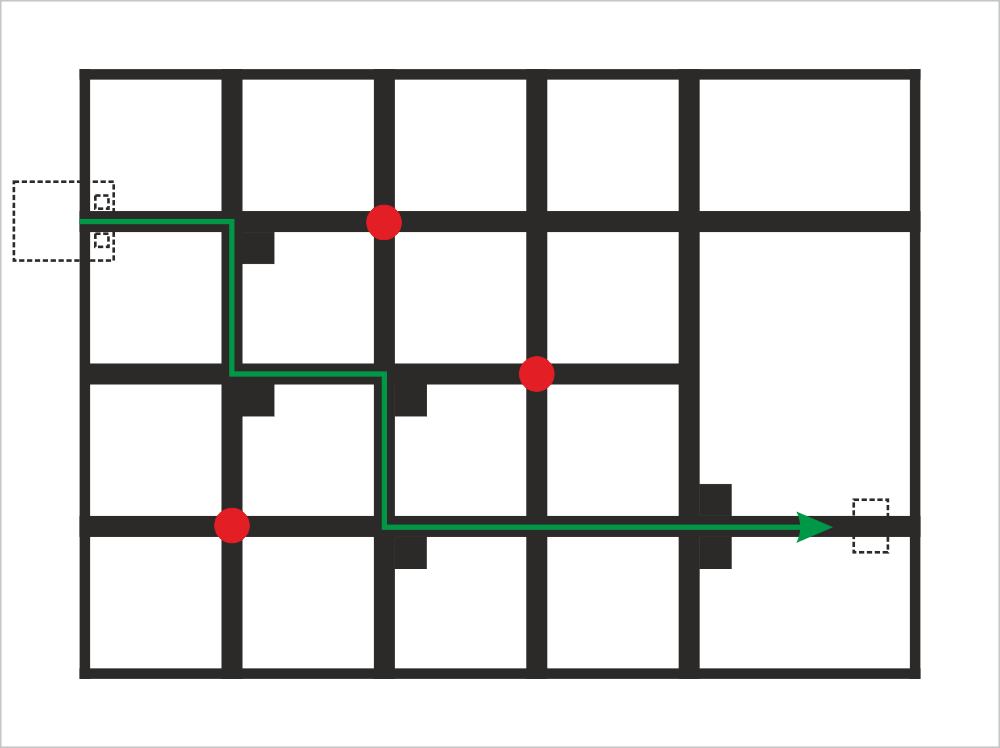
Робот, в начальный момент времени находится на въезде в ангар (зона старта) в одной из трёх возможных позиций (обозначены пунктиром). Ему необходимо вынести груз, который находится в конце ангара (зона погрузки) на одной из двух возможных позиций (обозначены пунктиром). На пути движения робота в складской зоне ангара могут находиться хранящиеся там образцы (кегли, отмечены красным), которые располагаются на пересечении толстых линий движения.

Для того чтобы робот двигался по нужной траектории, было придумано использование специальных меток (маркеры чёрного цвета), которые регламентируют необходимость поворота робота в ту либо иную сторону на 90 градусов с продолжением движения по линии. Метка поворота устанавливается сразу после перекрёстка впритык к пересекающимся линиям движения. Расположенная метка слева требует поворота налево, справа - направо по ходу движения робота. Для того, чтобы роботу легче было определиться с тем, что он двигается по прямой, которая выходит в зону погрузки, было решено слева и справа после перекрёстка установить по чёрному маркеру.
В приведённом примере зелёным указана траектория движения робота.
Такая система позволяет однозначно вывести робота на положение образца на поддоне, приготовленного к погрузке и избежать столкновений с возможно случайно забытыми в зоне погрузки образцами. Дело осталось за малым: захватить груз, вывести его за пределы ангара, продолжая двигаться по линии, и поставить в зоне доставки груза. После чего робот должен вернуться в ангар в зону погрузки.
Написать программу, позволяющую роботу из начального положения переместиться в складской зоне по определённой полосами движения и чёрными маркерами траектории до зоны погрузки. Загрузить с помощью вил погрузчика поддон в зоне погрузки. Переместить поддон в зону доставки. Затем вернуться без поддона в зону погрузки.
Робот должен начать своё движение из указанной стартовой позиции после того, как отпущен датчика нажатия. Секундомер начинает свой отсчёт вместе с этим событием.
Робот имеет ограниченную размерами ангара зону действия. Выход робота за пределы допускается в зонах старта и доставки груза.
Разность показаний датчиков освещённости на чёрном и на белом полях жюри:
Результат
Инструкция по размещению результата
© АО ИОО, 2026
{kind=link}