

Всем хорошо известно, что леса – это «лёгкие» планеты. С другой стороны, леса – это источник строительных материалов, сырья для целлюлозно-бумажной промышленности и много ещё чего. С одной стороны, их приходится вырубать, с другой – их необходимо восстанавливать. Сегодня мы попытаемся помочь одному лесному хозяйству в деле автоматизации процесса посадки саженцев для восстановления лесополосы.
Для этого у нас есть всё необходимое: робот, который может захватывать и перемещать саженцы, лесополоса, на которой могут располагаться саженцы (наше поле), подготовленные для посадки лунки.
Рассмотрим наше поле. Квадраты (они отмечены красными цифрами) являются моделью области, где расположен саженец или лунка для его посадки.
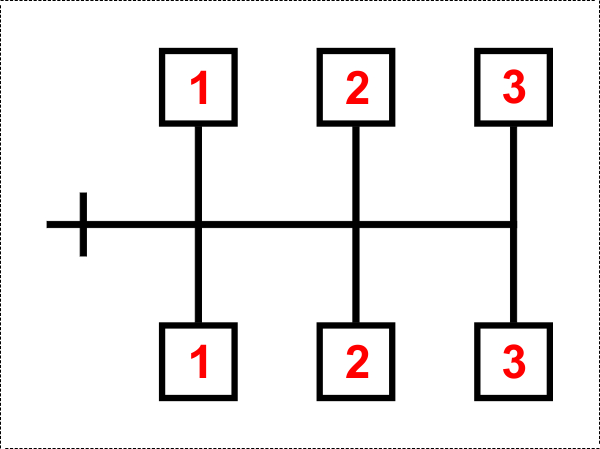
Если в центре квадрата установлена кегля, то это — модель саженца. Если в квадрате нет кегли, то будем считать его лункой для посадки саженца. Два квадрата, соединённых отрезком, – это положение «саженца» и «лунки». Таким образом, возможна, например, такая исходная конфигурация поля.
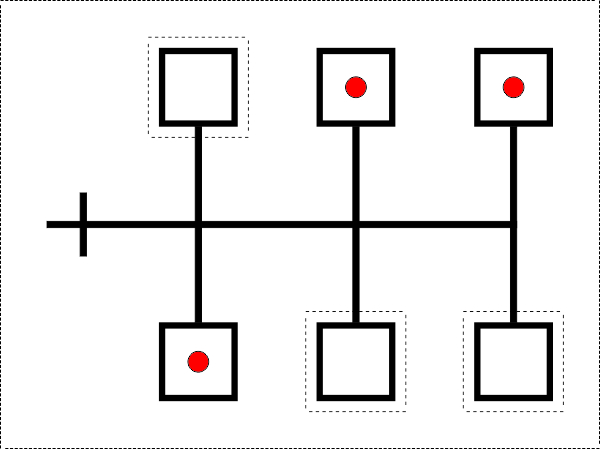
Напротив каждого «саженца» (круги красного цвета) располагается «лунка» (обведена пунктиром) для его посадки. На рисунке приведена только одна возможная ситуация.
Робот начинает своё движение из зоны старта, перемещает все подготовленные «саженцы» в их «лунки» и возвращается обратно.
Написать программу, позволяющую роботу из начального положения переместить все «саженцы» в «лунки» для посадки и вернуться в исходное состояние.
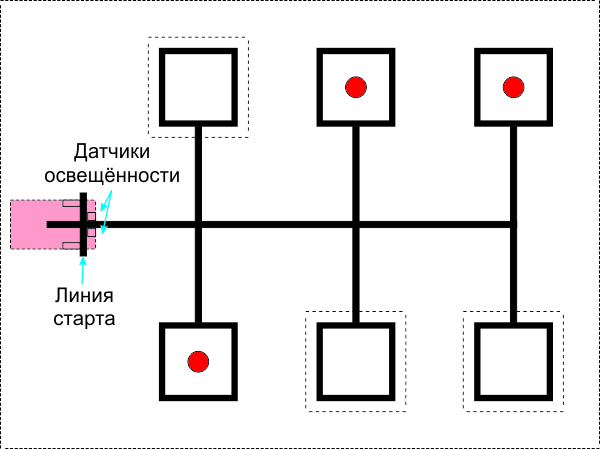
Робот должен начать своё движение из указанной стартовой позиции после того, как отпущен датчик нажатия. Секундомер начинает свой отсчёт вместе с этим событием. Считается, что робот жюри имеет горизонтальный (вилочный) захват в опущенном состоянии. Угол сведения захвата (вил) неизвестен.
Робот имеет ограниченную размерами поля зону действия. Выход робота (его трёх колёс) за пределы поля не допускается.
Результат
Инструкция по размещению результата
© АО ИОО, 2026