

Предложенное поле представляет собой модель части склада целлюлозно-бумажного комбината, в котором расположены рулоны готовой продукции. Рулоны бумаги (кегли) доставлены на склад в определённые позиции. С точки зрения кладовщика, подобная расстановка не является оптимальной и нуждается в корректировке для того, чтобы обеспечить дальнейшую эффективную транспортировку.
Рассматриваемая производственная организация крайне прогрессивна и использует в своей деятельности роботов. В том числе и на складе, где используется робот-погрузчик, который имеет возможность перемещать грузы по складу, для захвата которых использует специальный плоскостной манипулятор.
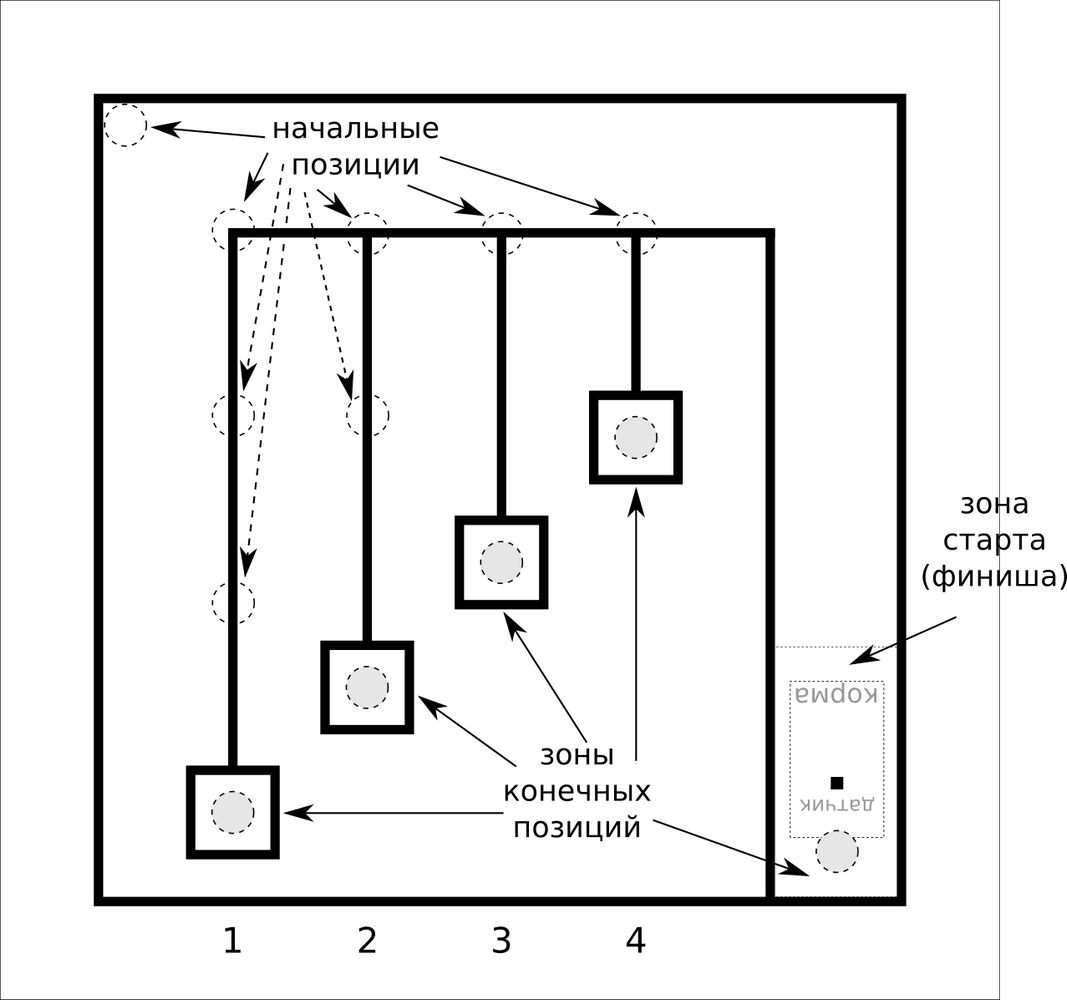
Для простоты позиционирования робота зона его действия ограничена и в ней нанесена следующая разметка:
Доставка рулонов бумаги осуществляется на определённые 5 позиций: 4 позиции вдоль
линий 1, 2, 3 и 4 соответственно; 5 позиция в углу зоны деятельности робота на северо-западе.
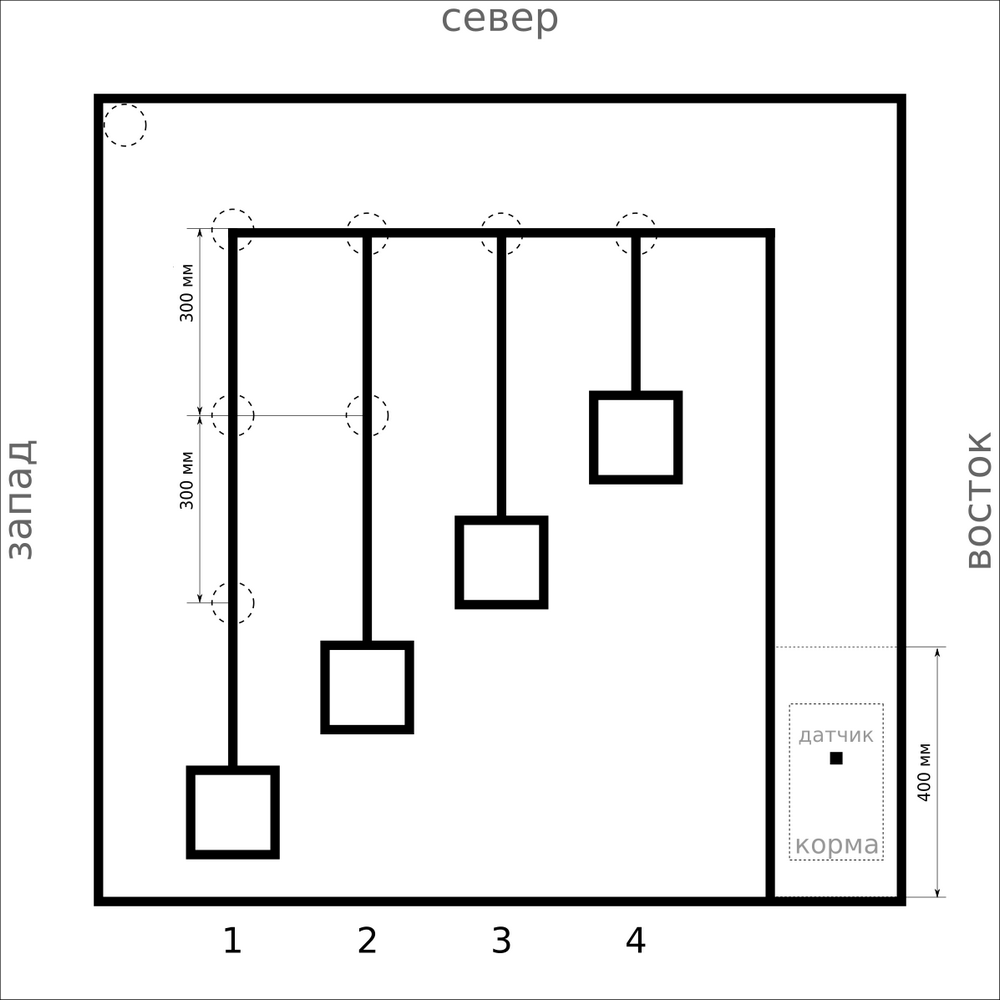
На линии 1 возможен один из трёх вариантов размещения рулона (отмечены пунктиром). На линии 2 - 2 варианта. На линиях 3 и 4 - по единственному варианту размещения.
Пример возможного варианта начального размещения:
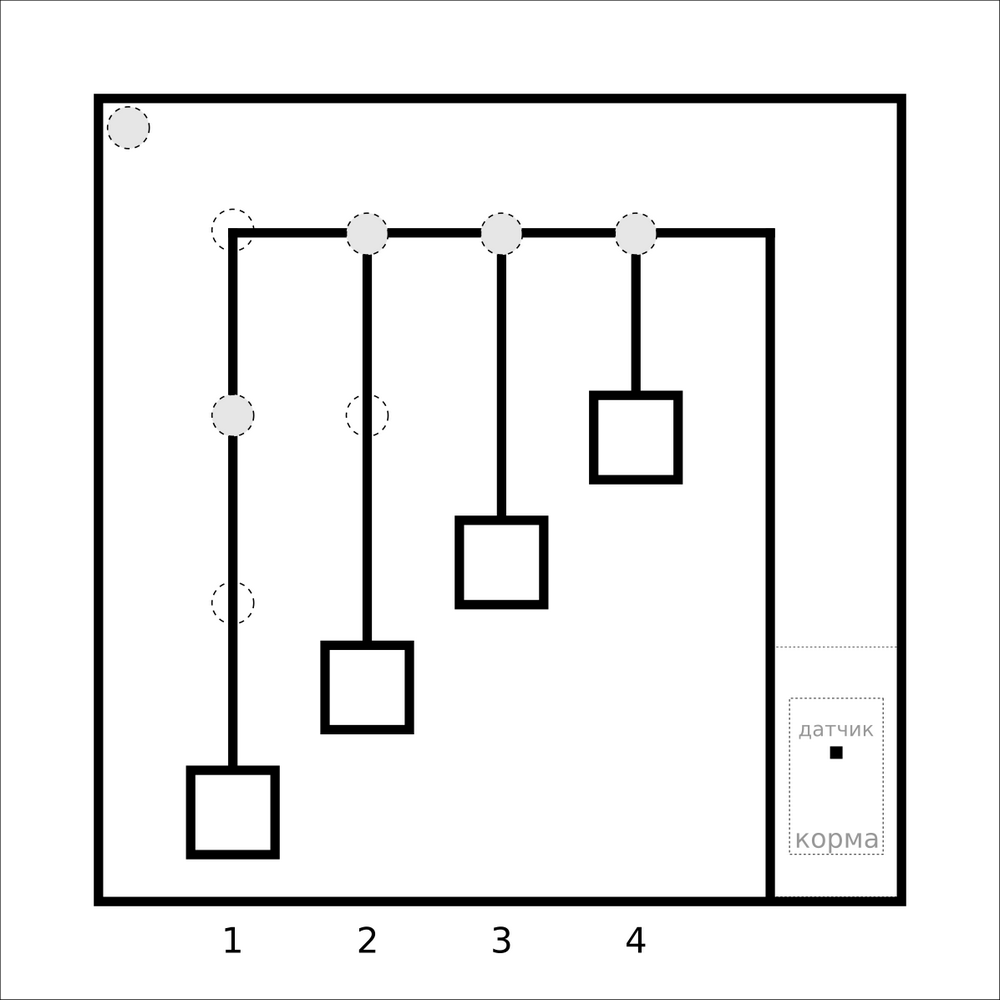
Роботу, созданному согласно техническому заданию турнира, предлагается
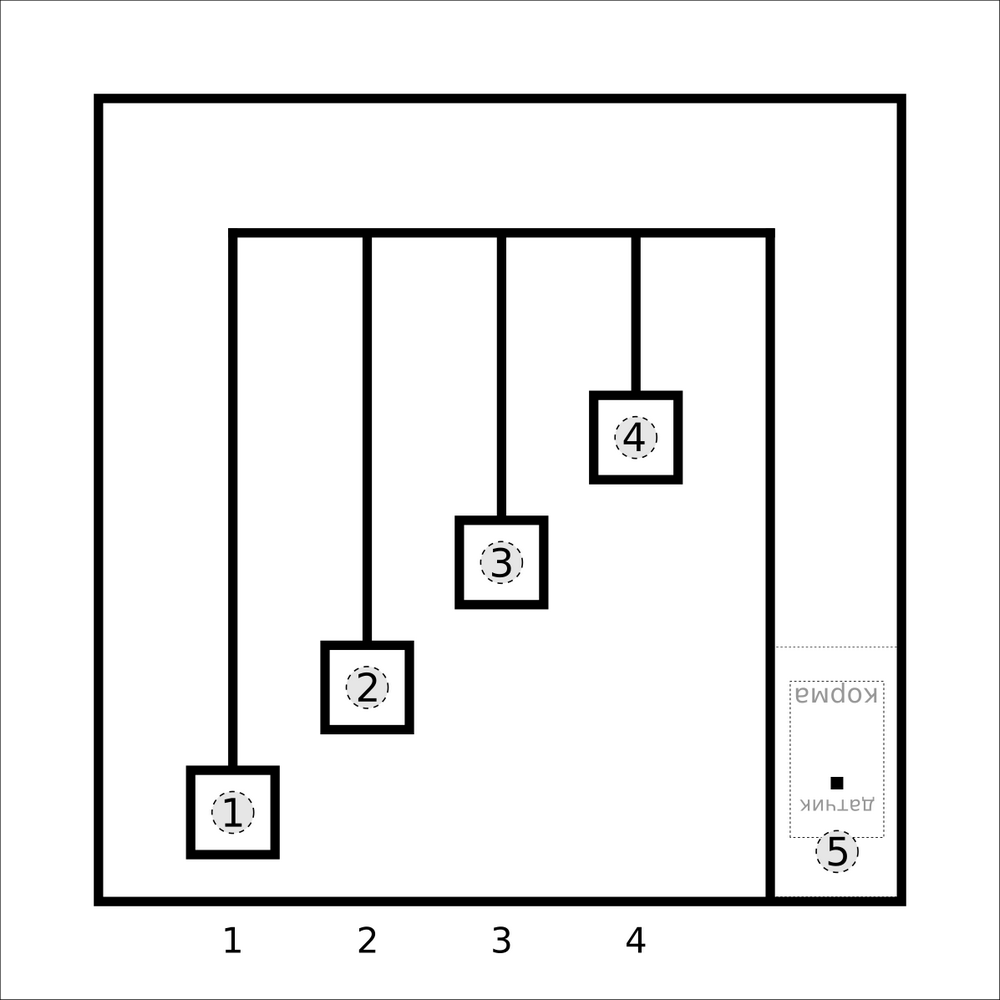
переместить пять рулонов из возможных стартовых позиций в обозначенные области в форме квадрата (для рулонов 1-4), стартовую позицию
робота (для рулона 5) и вернуться в начальное положение. Пример конечного положения рулонов обозначен кругами серого цвета.
Начальное положение
Зона действия
Робот имеет ограниченную зону действия размером 1300 х 1300 мм. Допускается выход за пределы зоны не более двух колёс робота.
Конечное положение
Выполнение задания считается оконченным, если движение робота прекращено более чем на 5 секунд.
Робот считается финишировавшим, если:
Задача
Написать программу, позволяющую роботу переместить все рулоны в конечные позиции.
Условие старта
Робот должен начать своё движение из указанной стартовой позиции после фиксации второго нажатия датчиком нажатия. Оператор, запускающий робота делает между нажатиями интервал, длительностью 1-5 секунд. Секундомер начинает свой отсчёт после второго нажатия.
Ограничения
Справочная информация показаний датчиков на полях жюри
Предварительные критерии оценки
Результат
Инструкция по размещению результата
© АО ИОО, 2026