

| Набор конструктора Lego Mindstorm Education EV3 (45544) | 2 штуки |
| Спичечные коробки | 18 штук |
| Бумага белая | 3 листа |
| Бумага черная | 3 листа |
| Клей для бумаги | 1 штука |
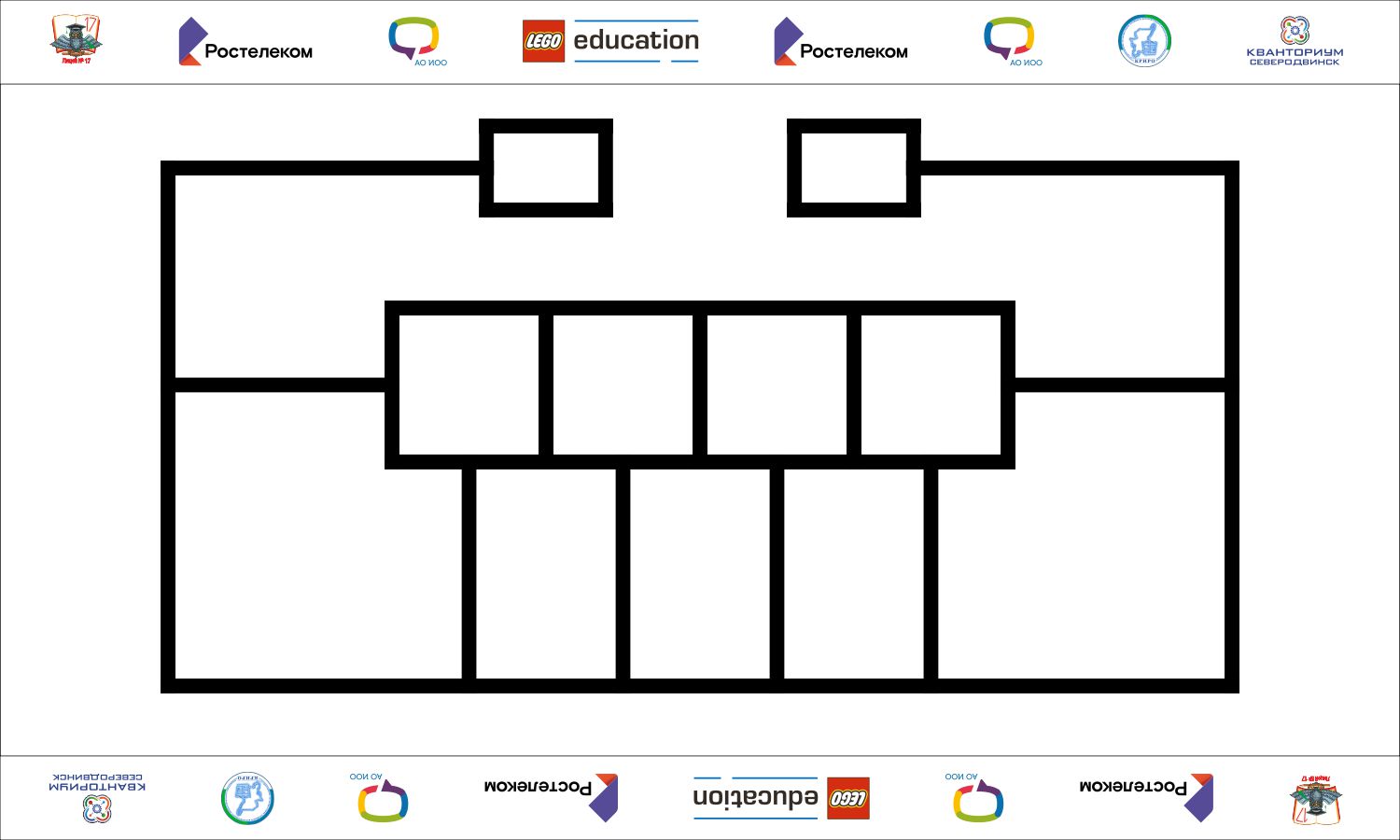
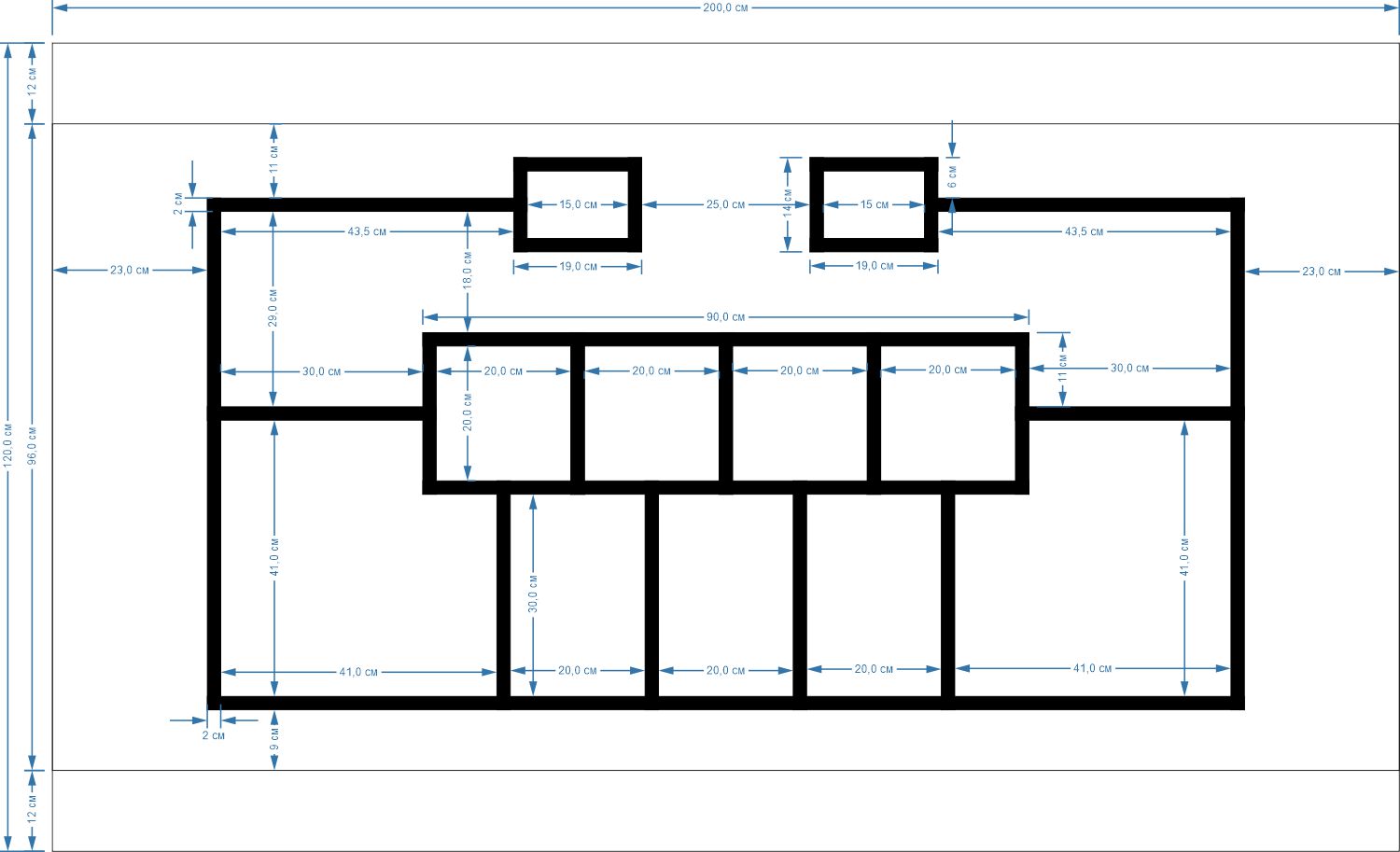
| Поле (200×120см) | 1 штука |
Поле представляет собой ровную поверхность белого цвета размером не менее 200×120 см. Для поля может быть использована любая ровная поверхность (столы, пол, лист пластика и т.п.). В качестве покрытия могут быть использованы листы ватмана, белый пластик, белая баннерная ткань, склеенные листы бумаги и т.п.
На поле необходимо нанести следующую разметку (в векторном формате SVG, CDR). Для открытия изображения в формате SVG рекомендуем InkScape, CDR - CorelDraw.
Для разметки могут применяться маркер чёрного цвета, изоляционная лента (изолента) чёрного цвета шириной 20(19) мм, интерьерная или сегментированная печать.
Объекты кубической формы – 6 штук: 3 штуки белого цвета, 3 штуки чёрного цвета. Каждый объект состоит из 3 спичечных коробков.
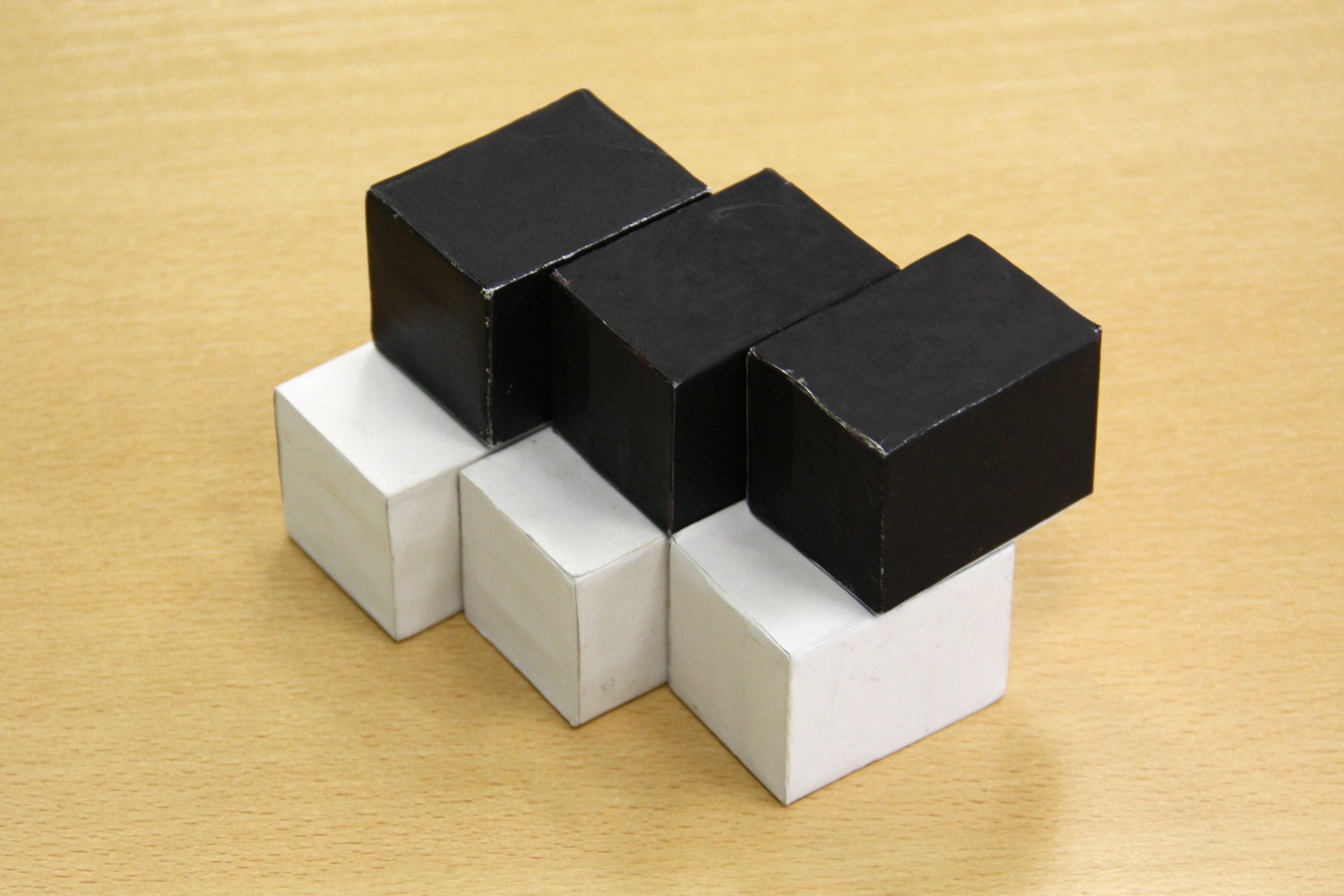
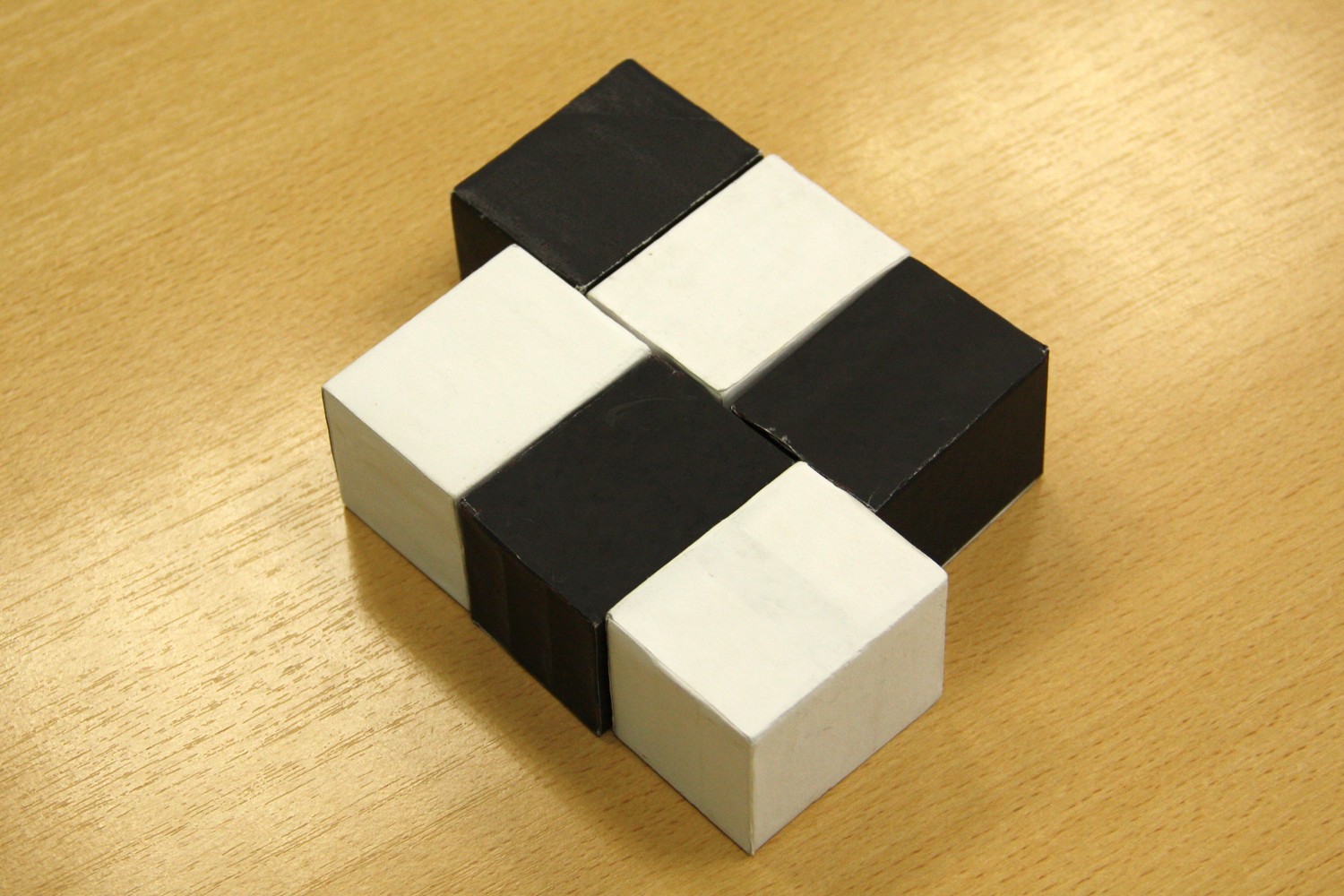
Итоговый размер одного объекта кубической формы 51×37×37 мм.
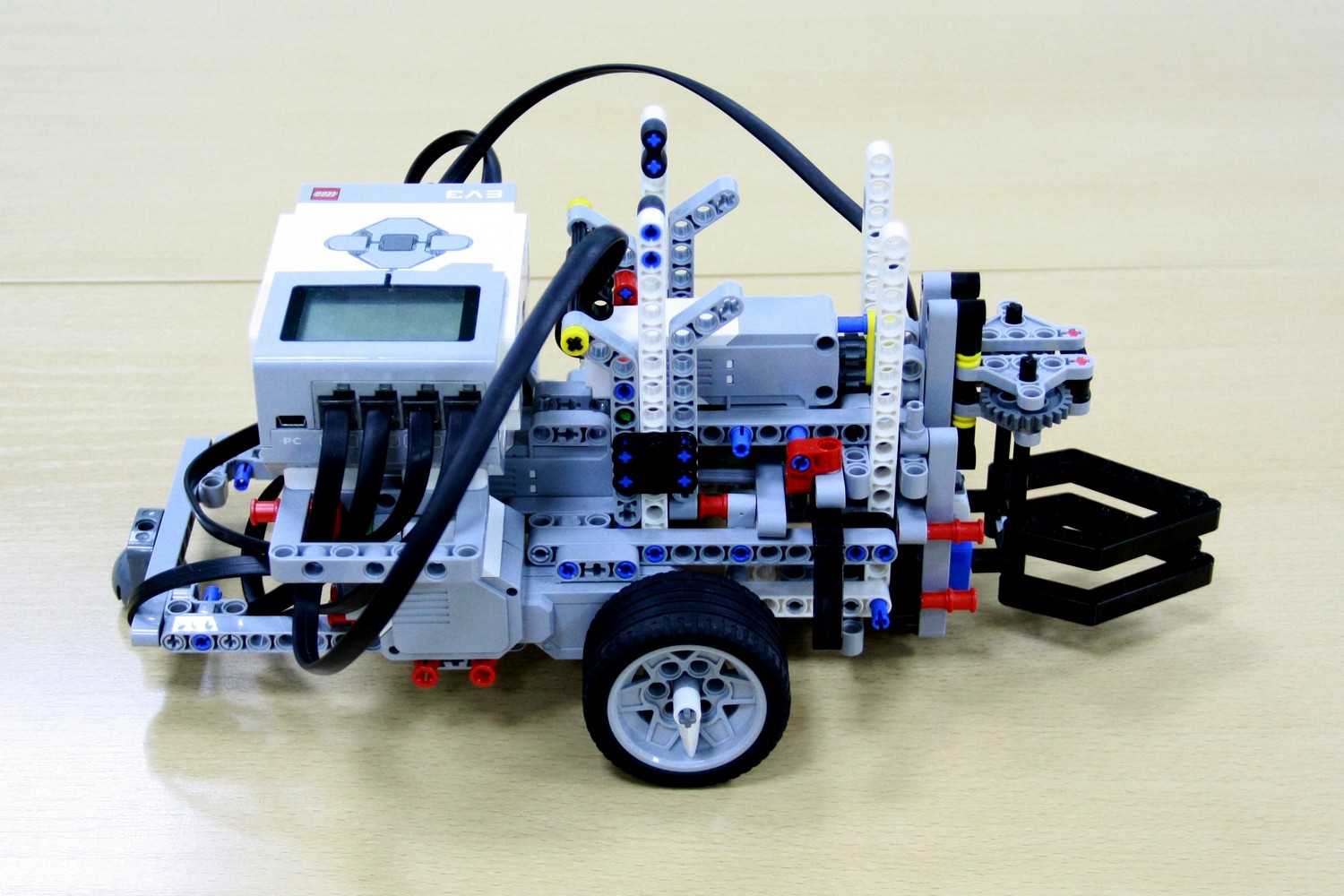
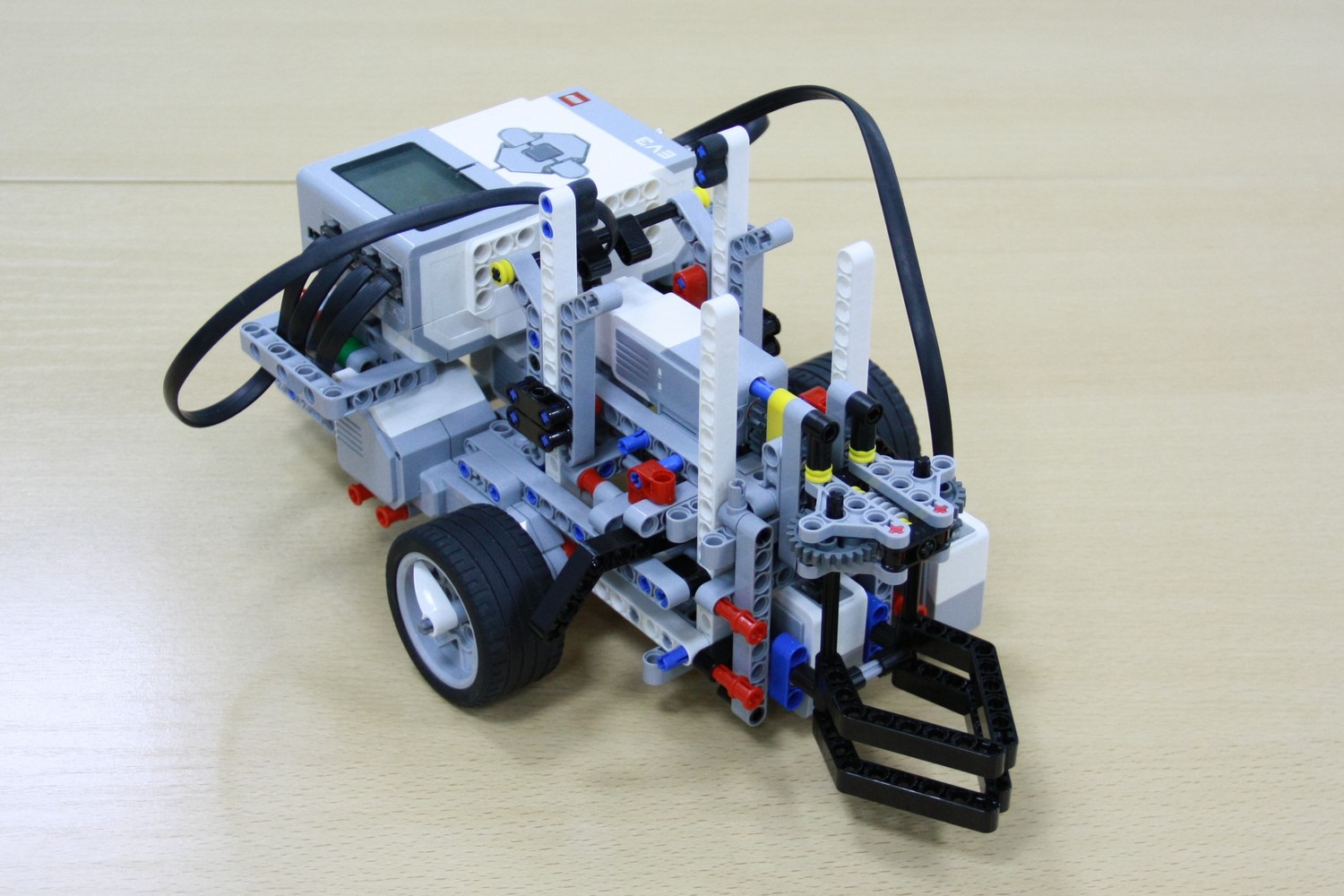
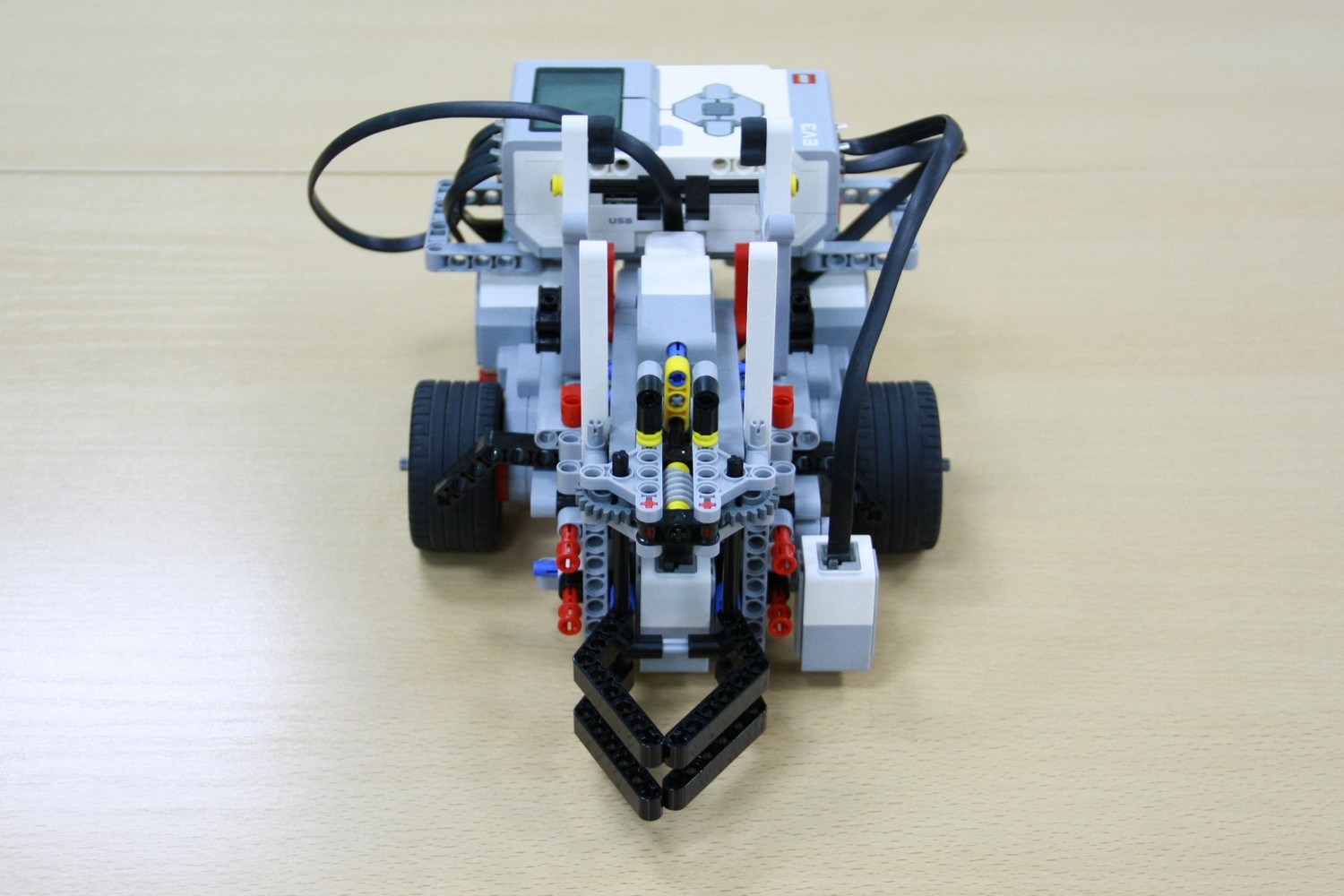
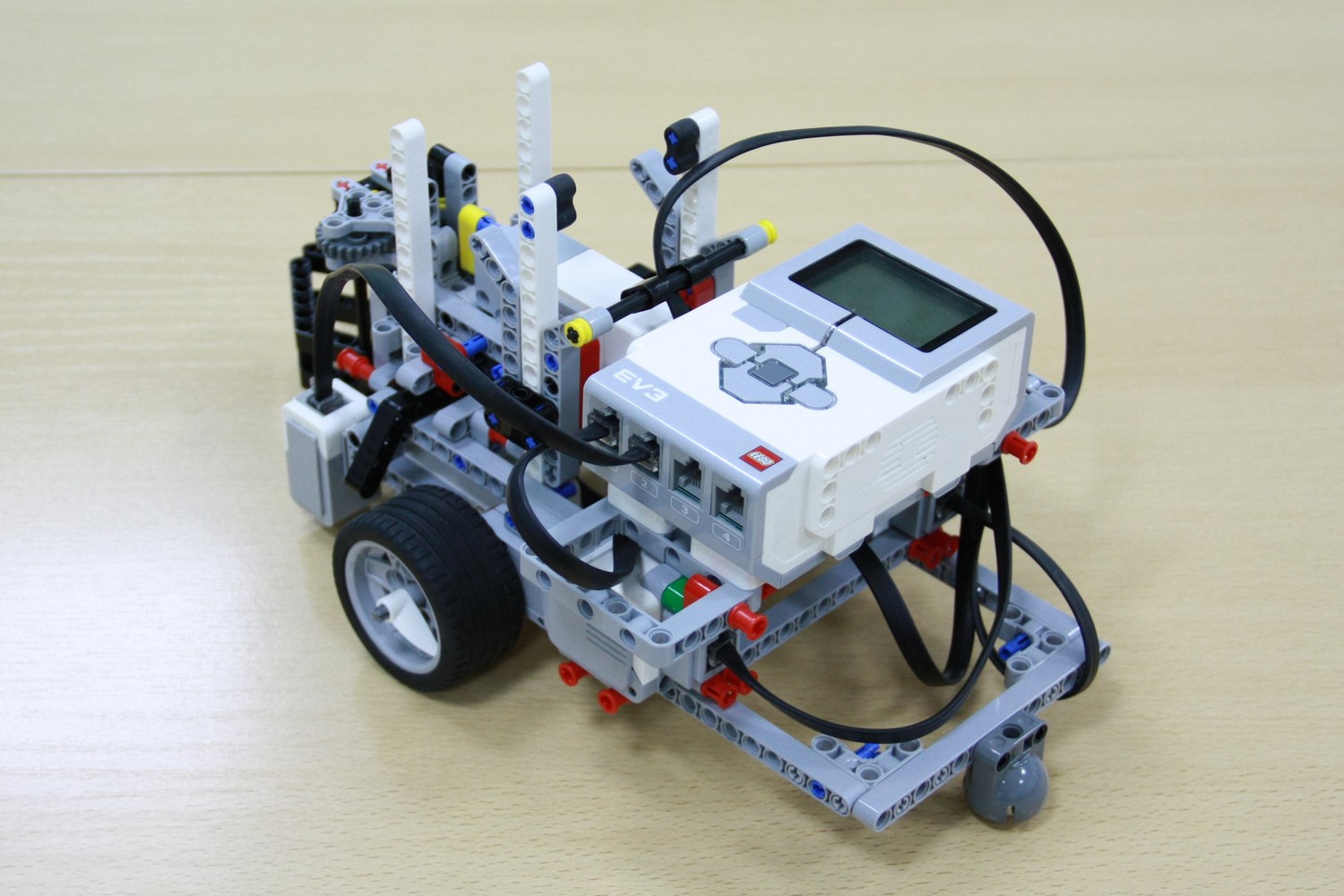
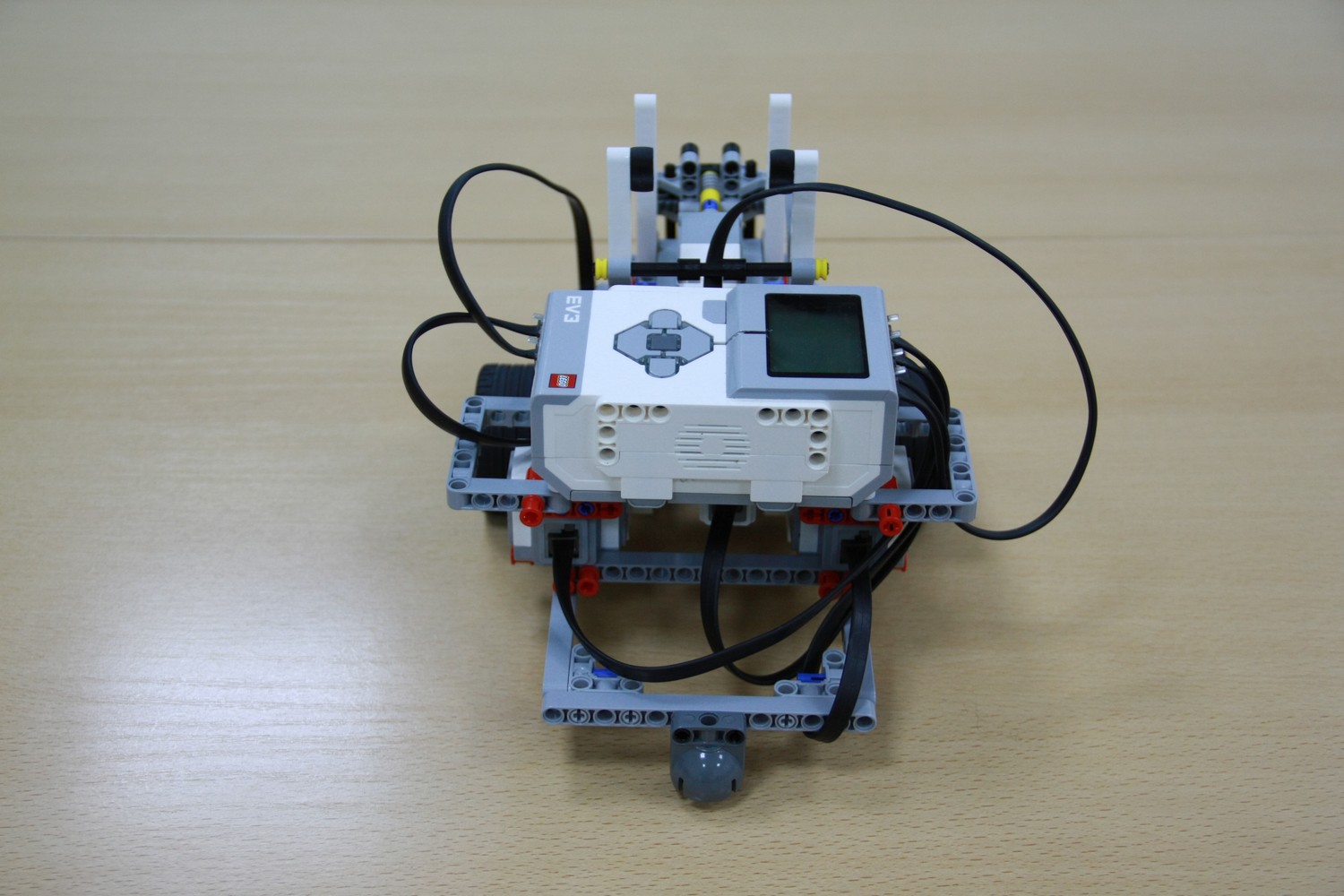
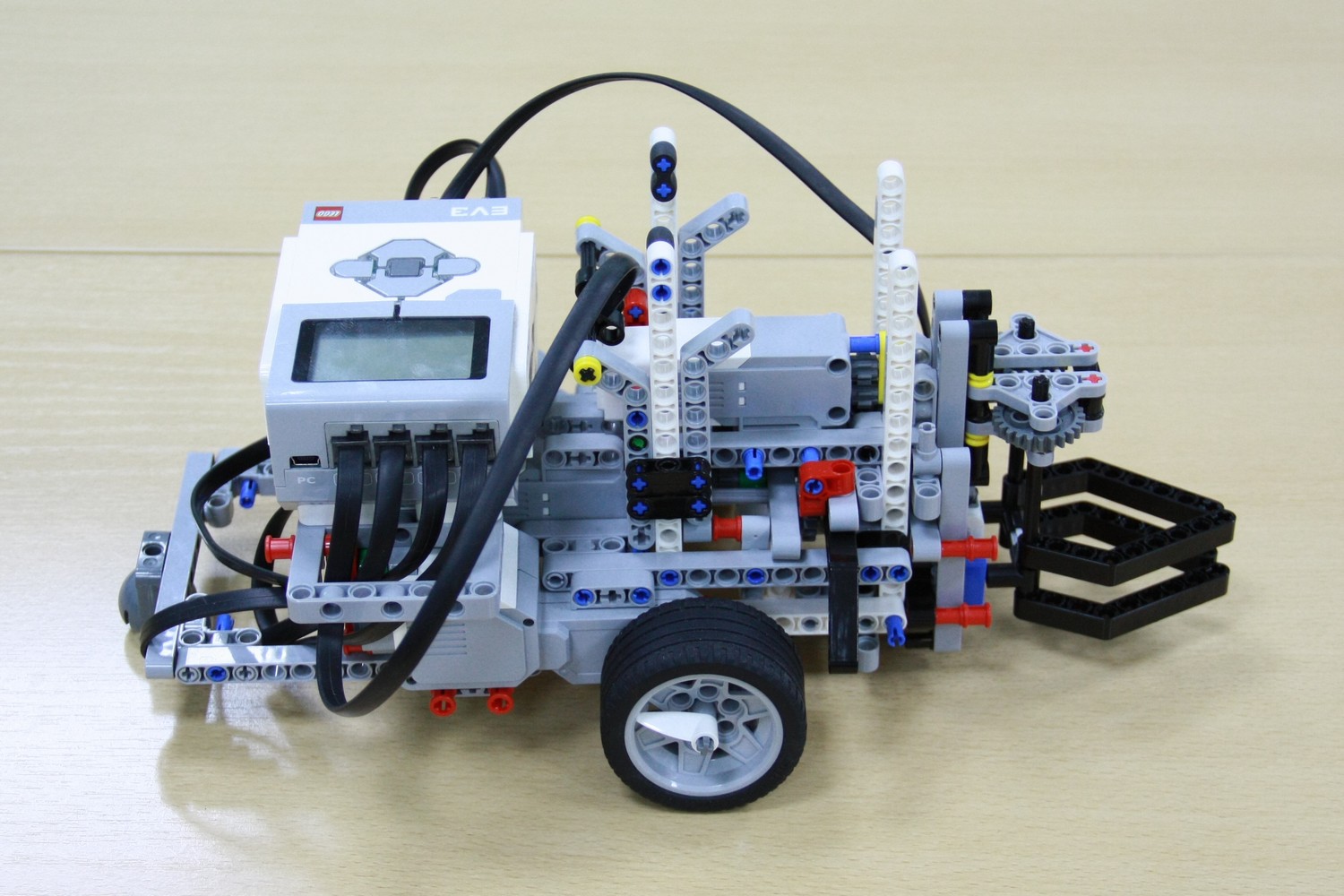
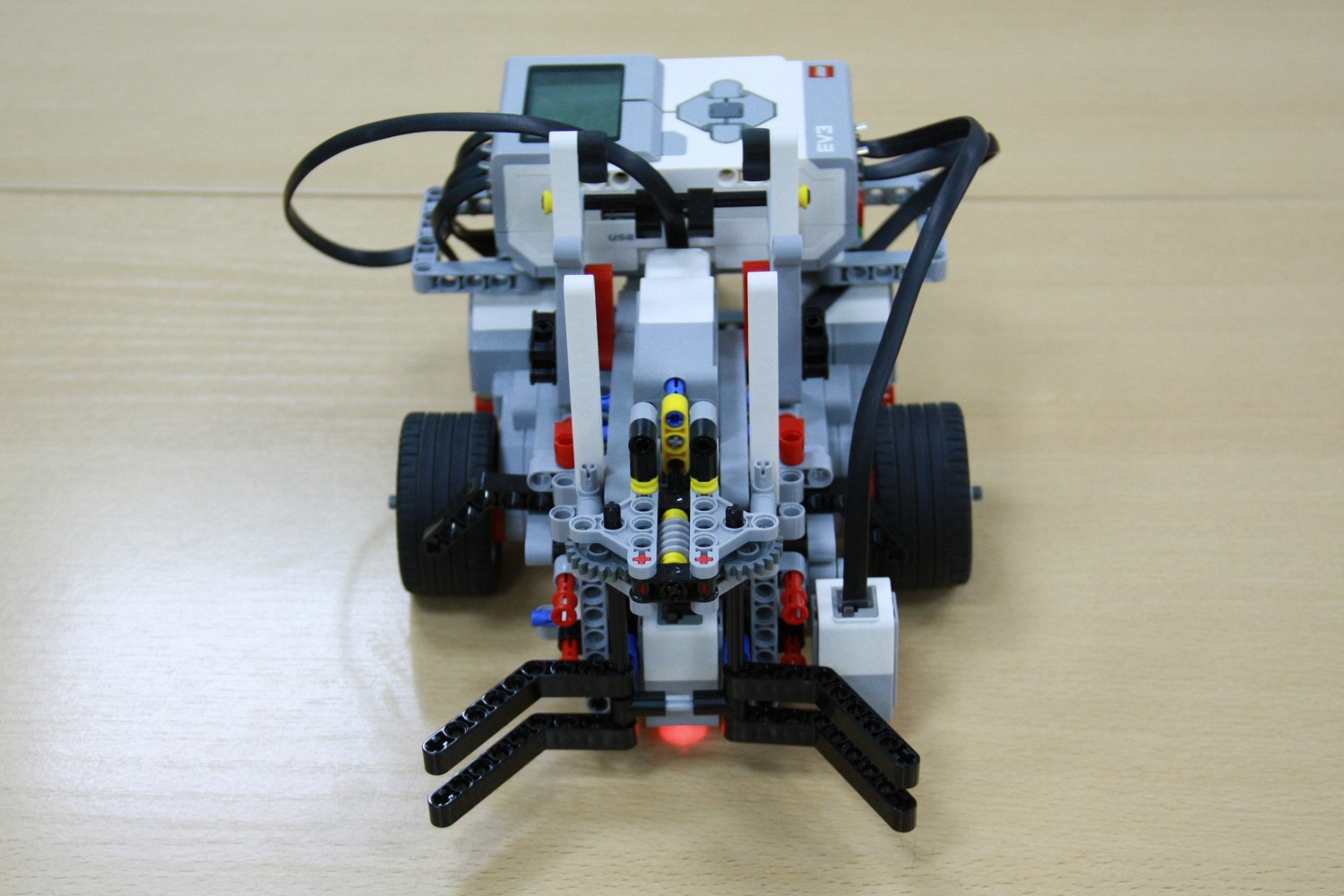
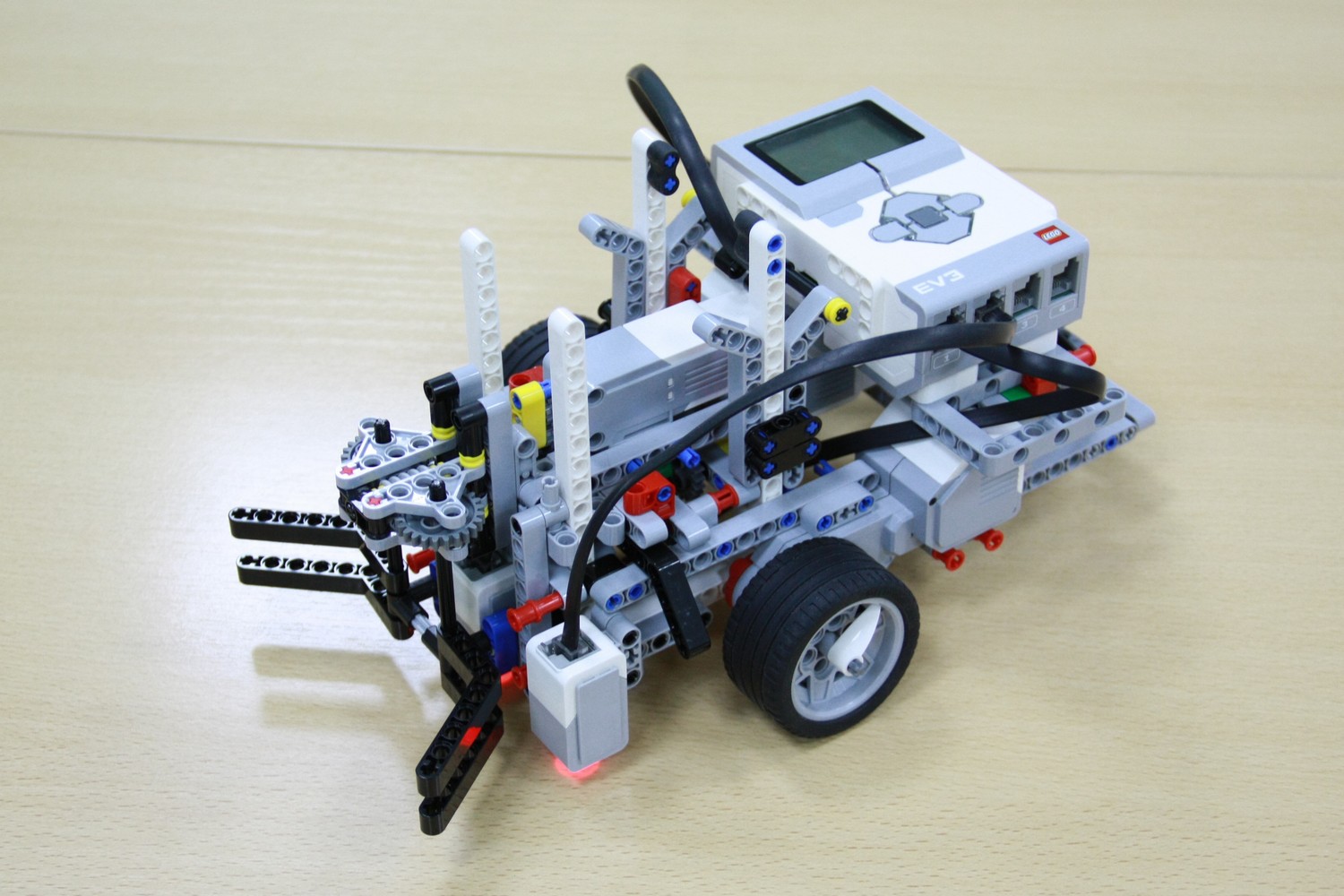
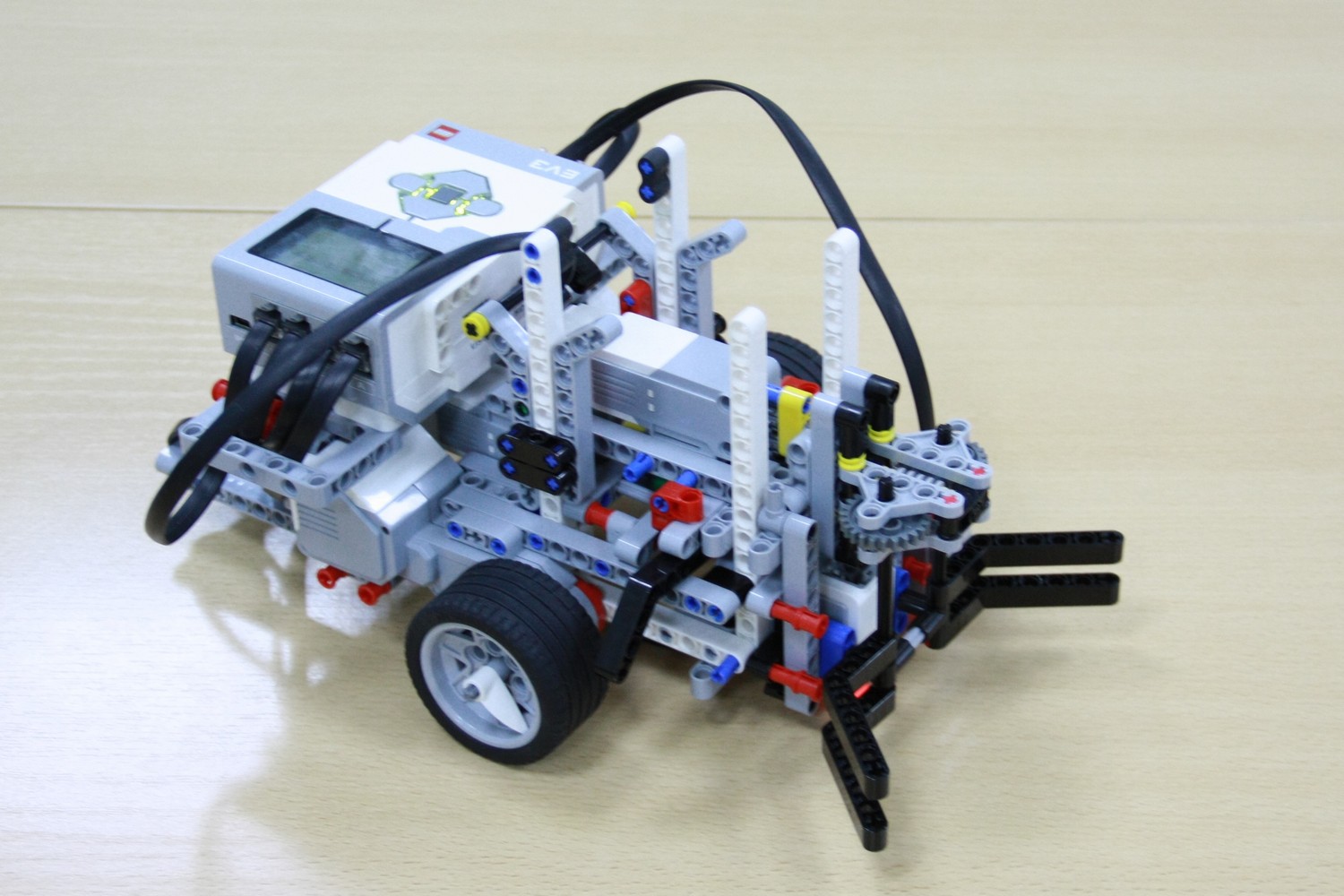
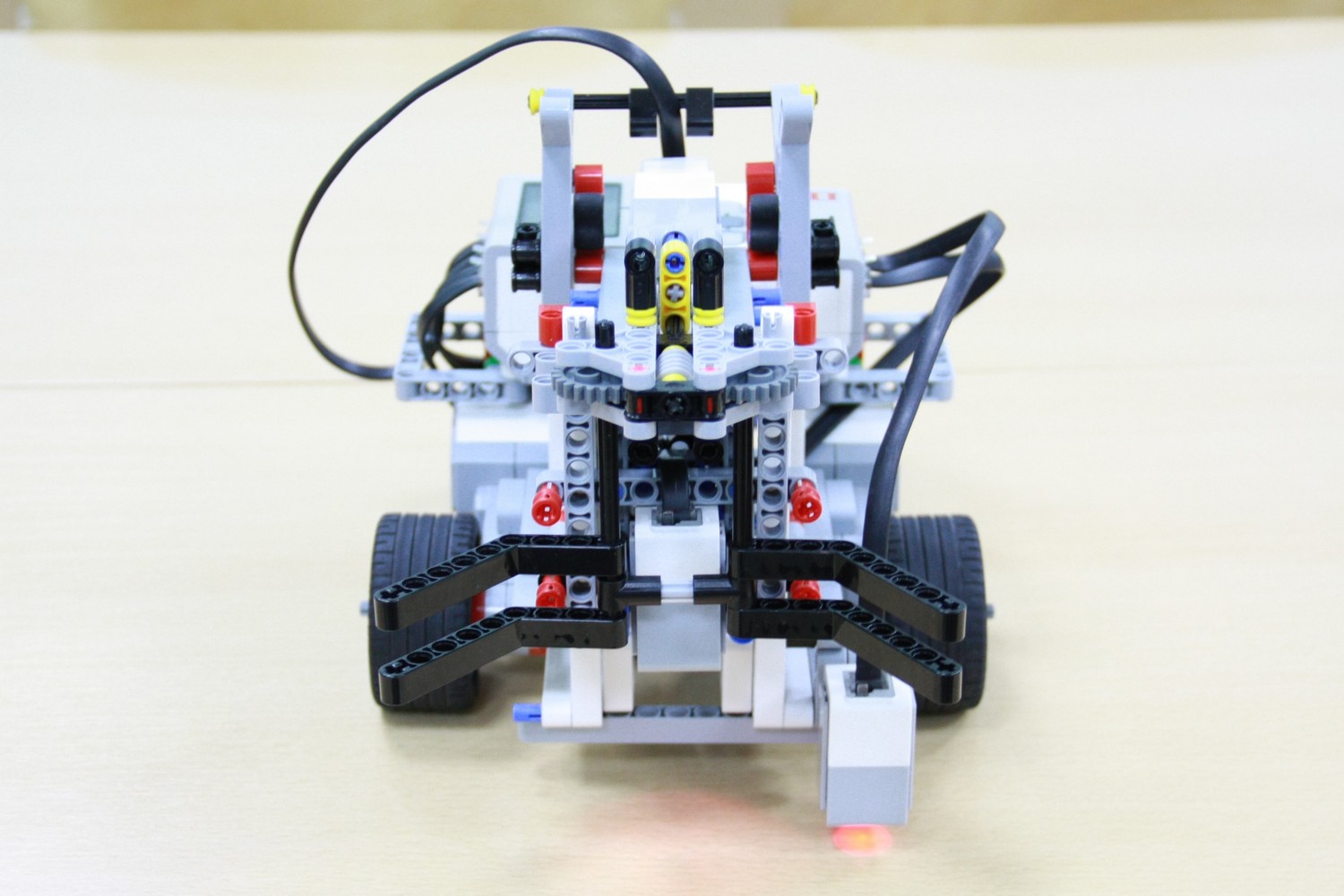
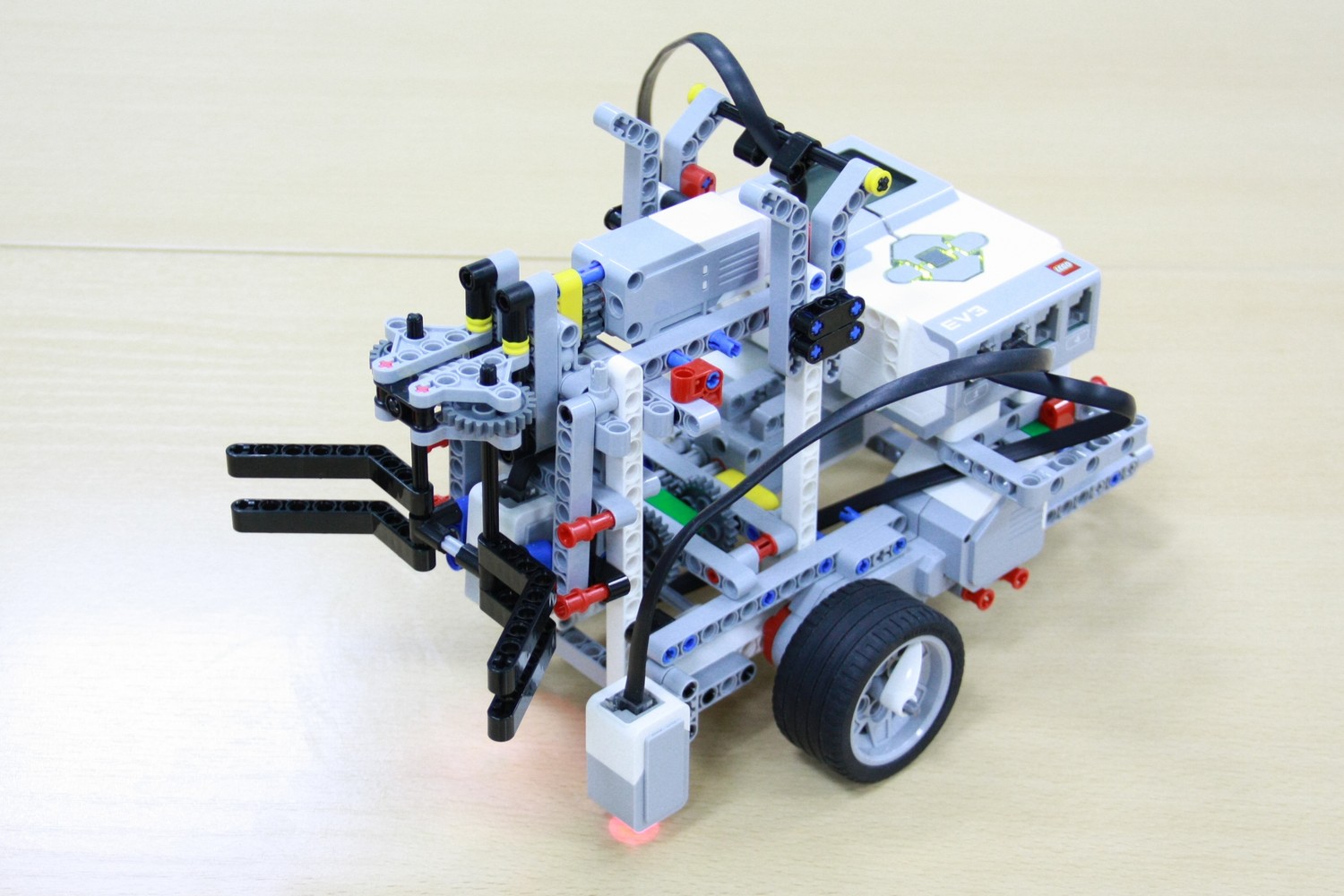
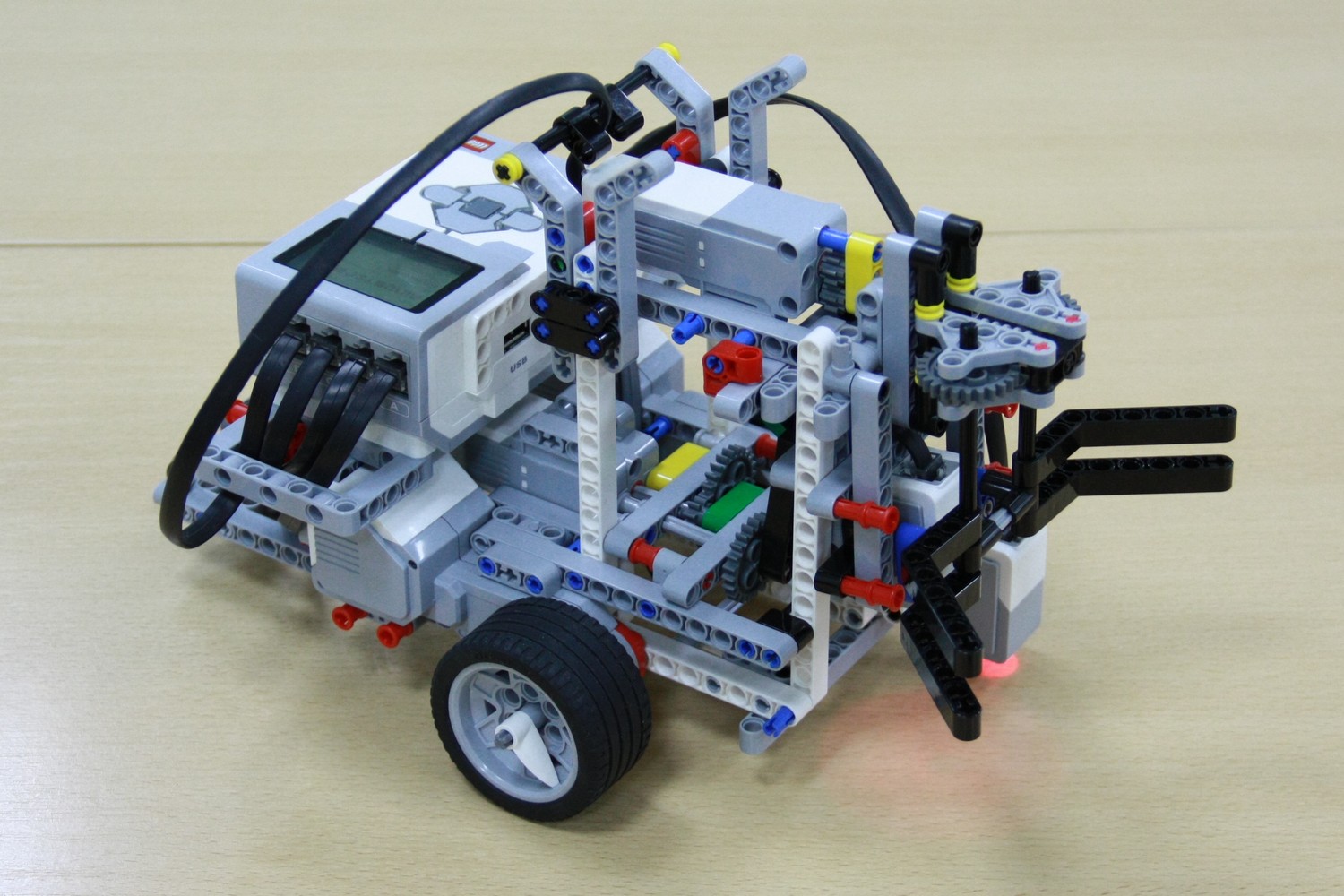
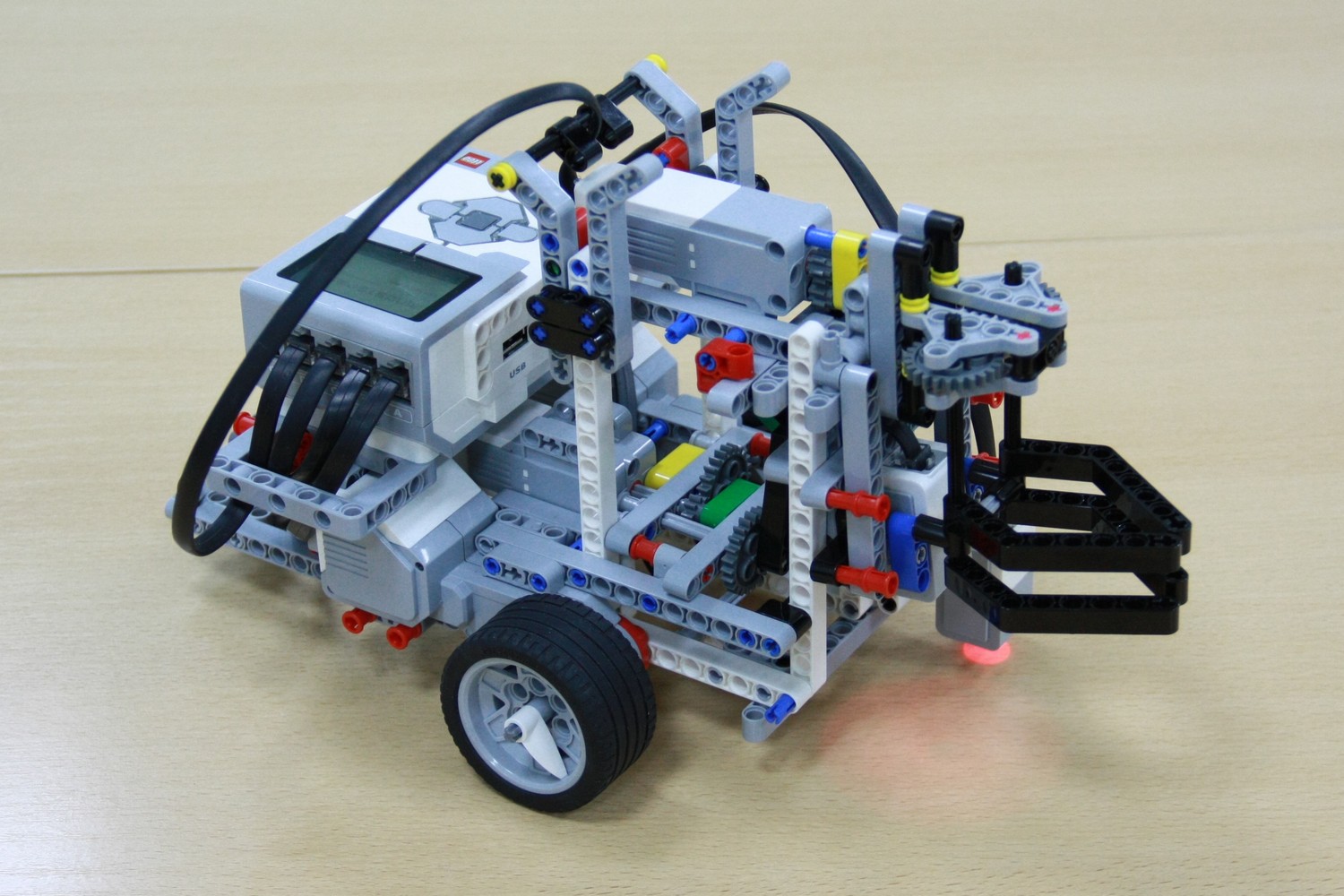
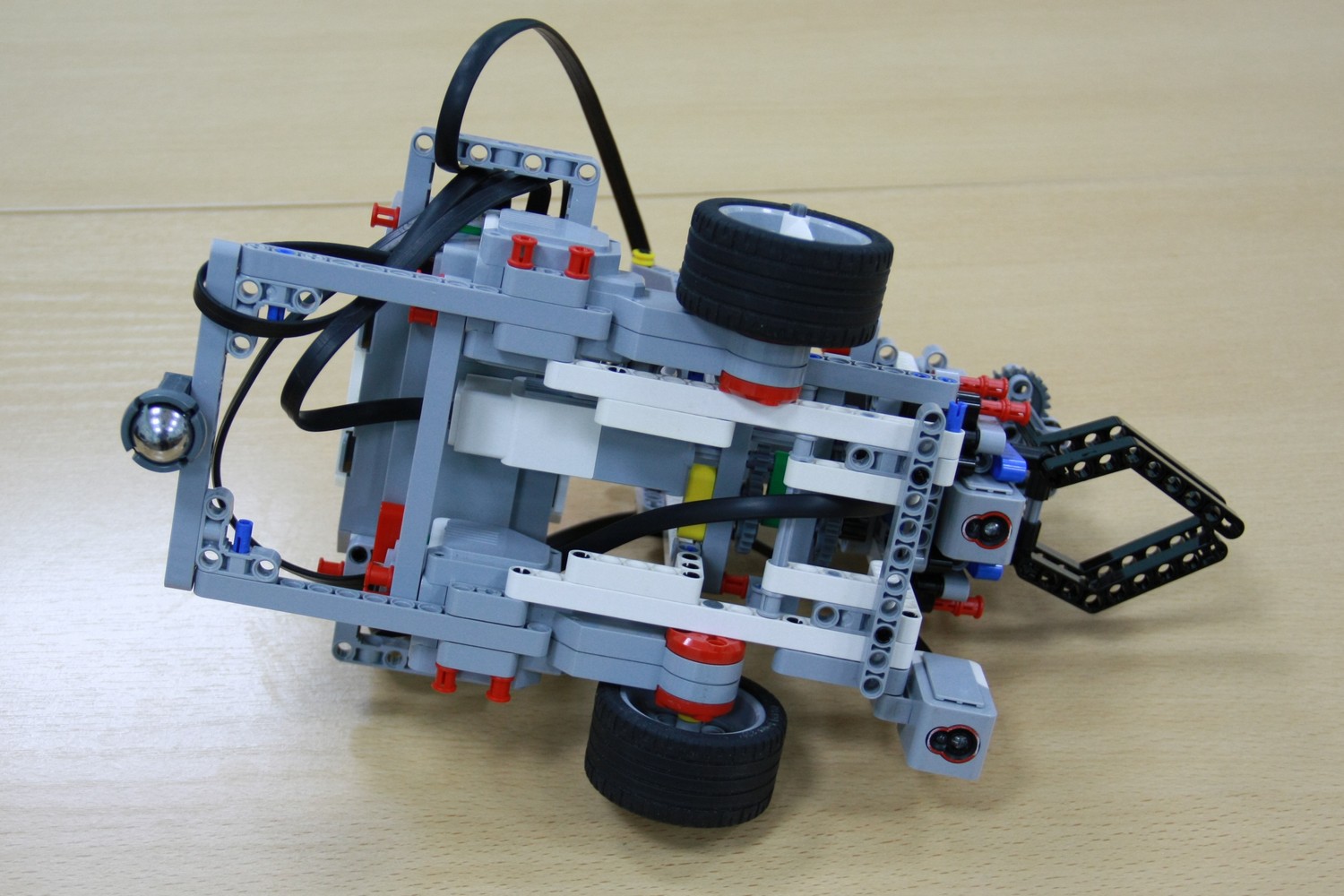
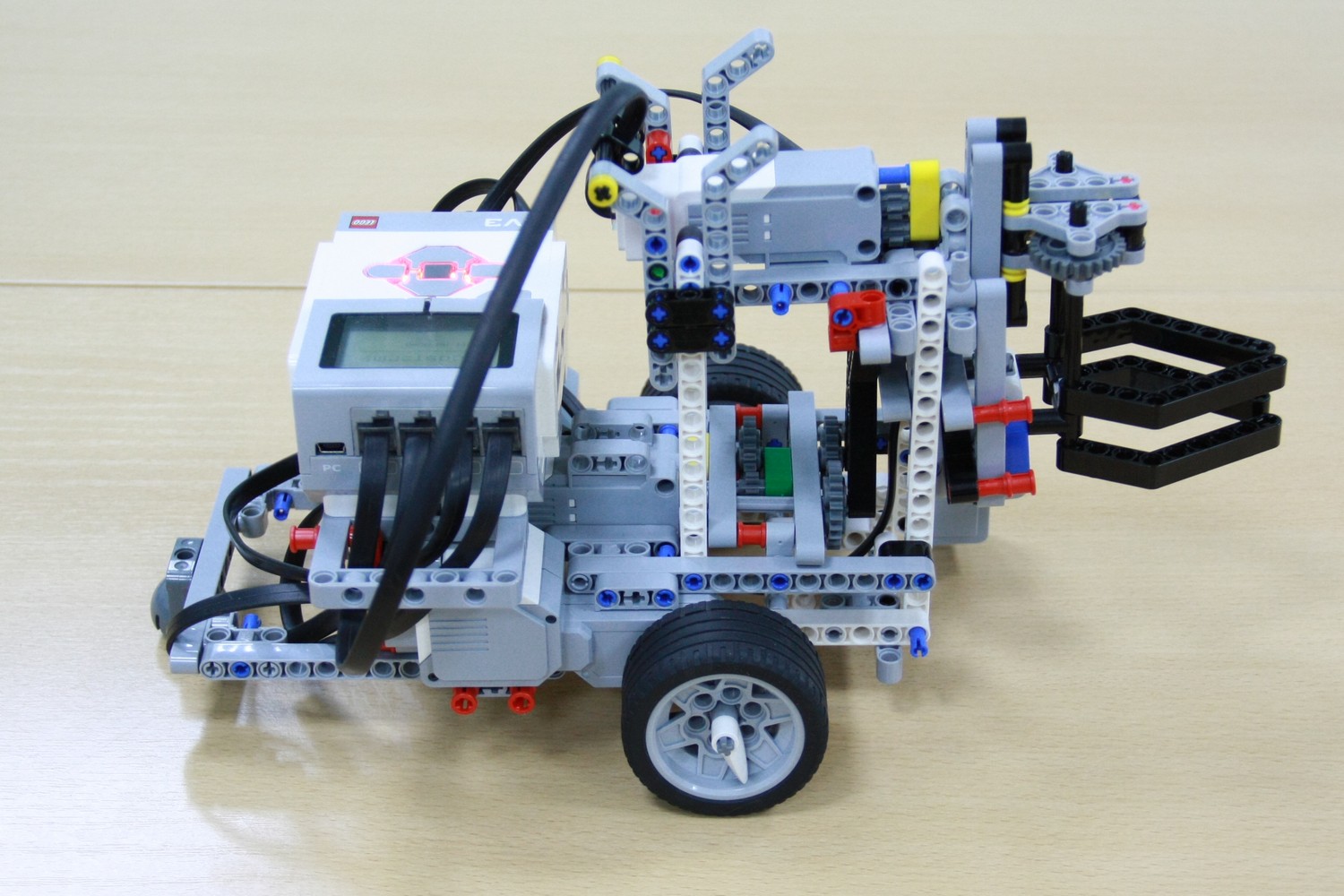
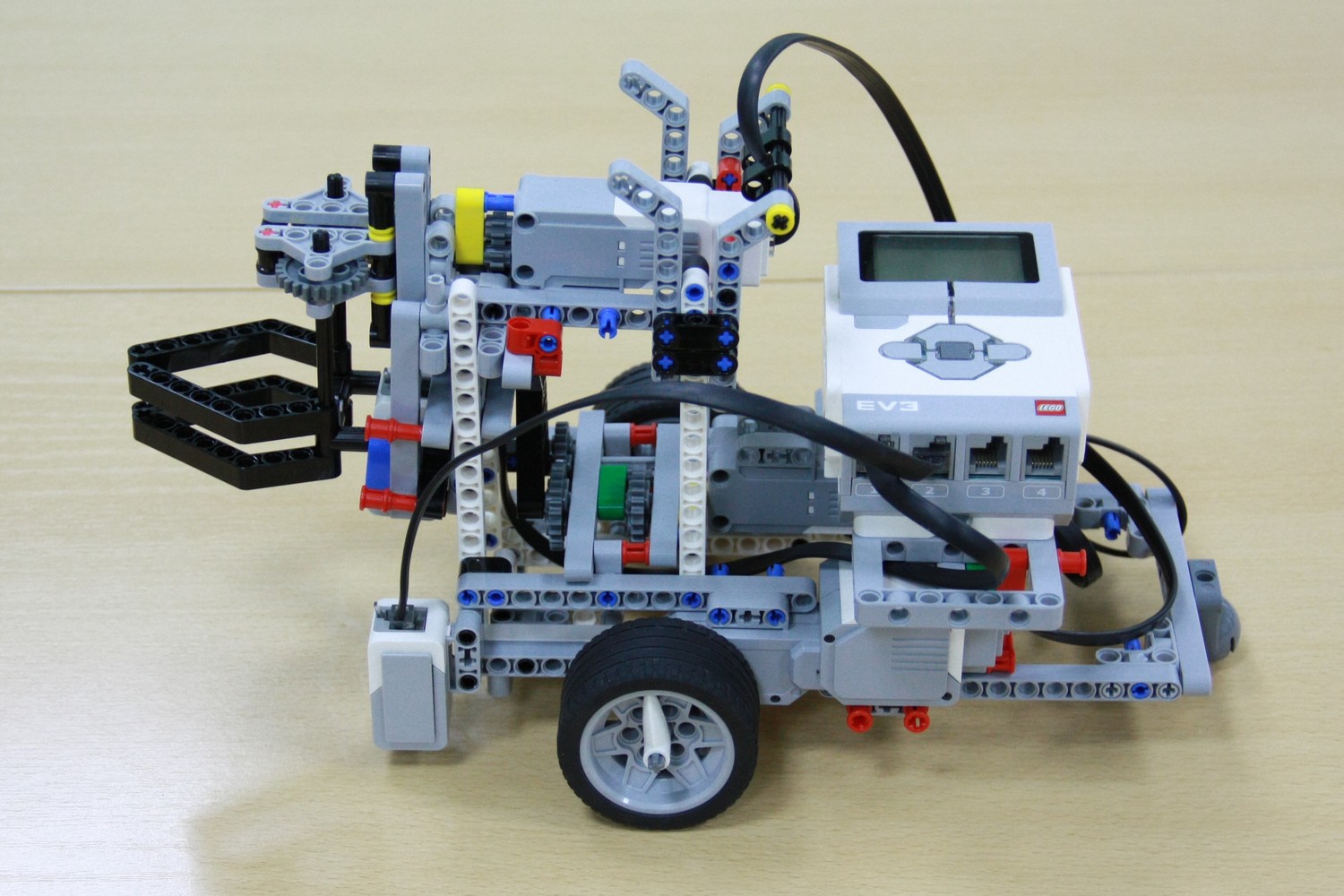
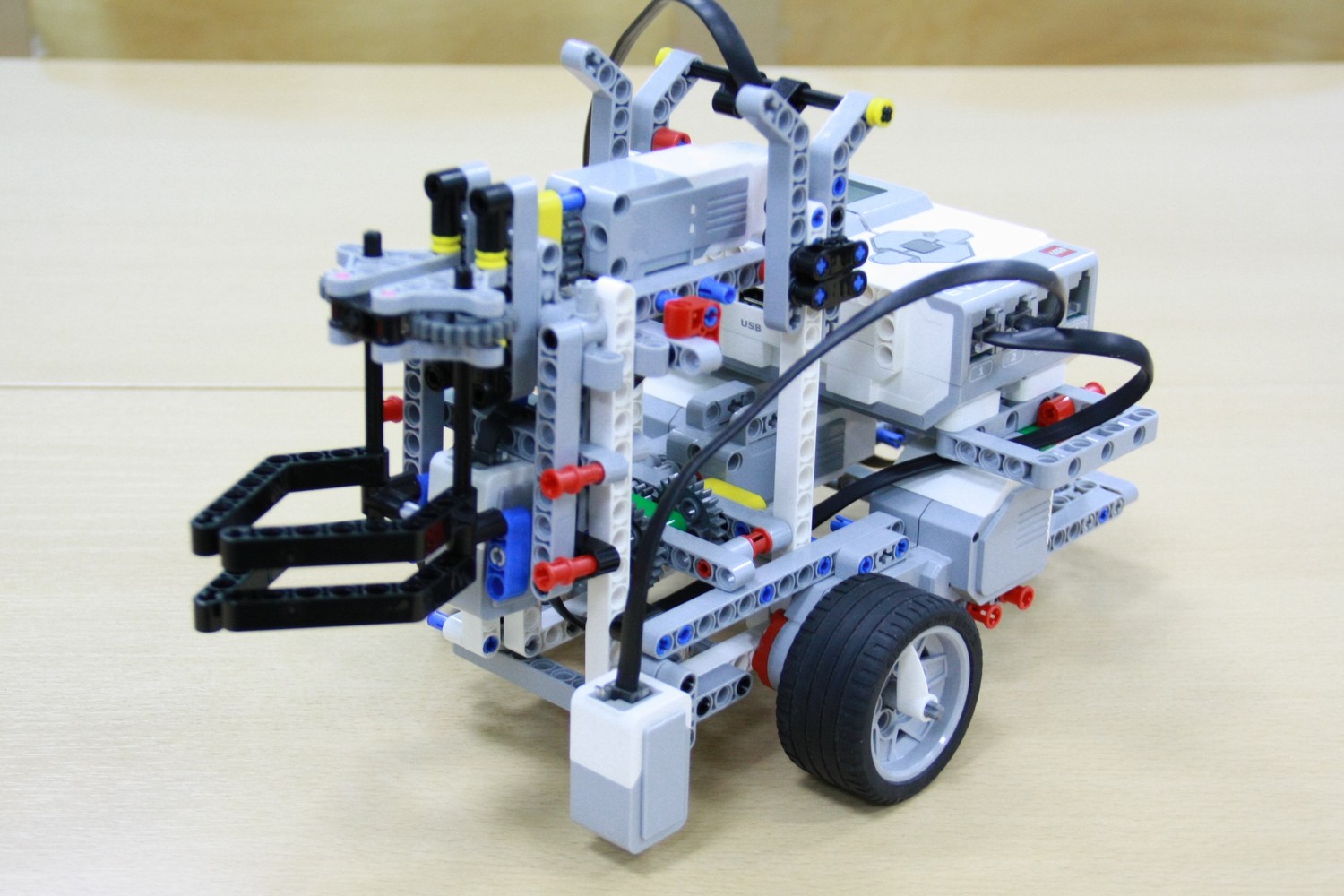
| Объект «Робот» | 1 штука |
Программное обеспечение для просмотра модели (Lego Digital Designer)
База данных деталей «Assets.zip» (скопировать и заменить стандартную в папке с установленной программой).
Полный набор ПО для просмотра модели.




Для программирования «Робот» могут быть использованы следующие среды:
Подключения портов изделия «Робот»:
© АО ИОО, 2026
{kind=link}